核间通信-Linux下RPMsg使用与源码框架分析
目录
1 文档目的
2 相关概念
2.1 术语
2.2 RPMsg相关概念
3 RPMsg核间通信软硬件模块框架
3.1 硬件原理
3.2 软件框架
4 使用RPMsg进行核间通信
4.1 RPMsg通信建立
4.1.1 使用名称服务建立通信
4.1.2 不用名称服务
4.2 RPMsg应用过程
4.3 应用层示例
5 RPMsg内核驱动源码解析
5.1 RPMsg框架源码
5.1.1 源代码与功能
5.1.2 源码分析
5.2 virtio介绍
5.2.1 virtio源码及virtio_queue原理介绍
5.2.2 源码分析
5.3 remoteproc介绍
5.3.1 remoteproc子系统
5.3.2 remoteproc源码解析
5.4 mailbox 框架
5.4.1 mailbox源码介绍
5.4.2 mailbox框架源码解析
6 收发数据流程总结
6.1 接收数据过程调用栈
6.2 发送数据过程调用栈
6.3 收发数据buffer处理过程
6.3.1 J6缓冲区处理流程
6.3.2 stm32-mp157缓冲区处理流程
6.3.3 缓冲区处理
7 附录
1 文档目的
该文档目的介绍RPMsg基础概念知识、RPMsg整体使用流程,rpmsg、virtio、remotepro、mailbox软件框架、硬件原理相关介绍和RPMsg适配新平台的开发流程,以帮助开发者更好理解RPMsg核间通信框架,进行核间通信开发。
2 相关概念
2.1 术语
RPMsg: remote processor messages,Linux下用于核间通信顶层框架,面向驱动开发者。
Virtio: virtual IO,linux平台下一种IO半虚拟化框架。
Remoteproc: Remote Processor Framework,用于管理异构远程处理器设备,既是一个硬件模块,Linux也实现了对应的remoteproc框架,remoteproc框架允许不同平台或架构控制远程处理器。
Mailbox:Linux一种软件框架,通过消息队列和中断驱动信号处理多处理器间的通讯,也有人把用于核间通信模块称为mailbox,软件上是个框架,硬件也是个IP。
MHU:mailbox and handshake uint,是个硬件模块,包含mailbox功能和握手功能,用来确认双方收发情况,减少丢包等。
IPCC:功能上跟mailbox一样,用于核间通信的硬件IP模块。
2.2 RPMsg相关概念
RPMsg-Lite 组件: Remote Processor Messaging(RPMsg)协议的一个轻量级实现。
通道:用于数据传输,通信前需要建立通道,跟实际硬件通道(mailbox/MHU/IPCC)不是同一个概念(后面详细解析),是RPMsg的一样虚拟概念。
端点:用于核间通信的具体控制点,利用通道进行数据通信。
3 RPMsg核间通信软硬件模块框架
3.1 硬件原理
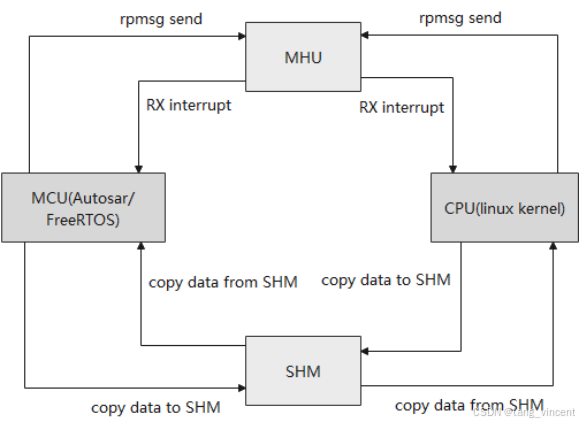
RPMsg硬件上依赖mailbox或者MHU(mailbox and handshake uint)和共享内存。基于原理是利用mailbox/MHU模块,触发接收端对应通道中断,接收端收到中断,从共享内存中取出发送放放在共享内存中的数据,如下图:
3.2 软件框架
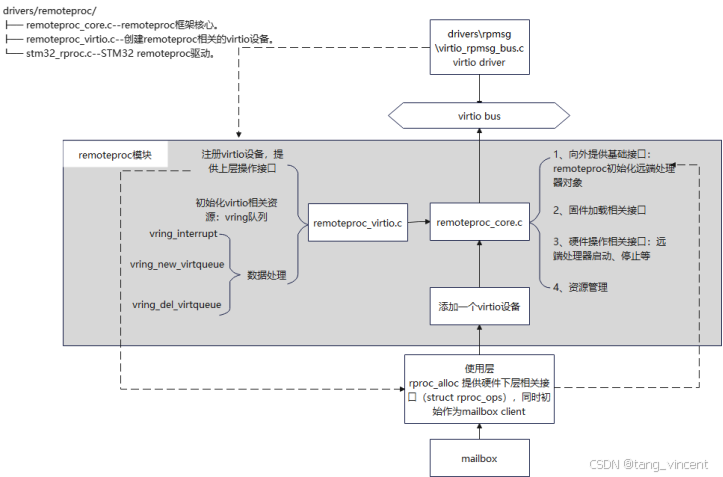
RPMsg是在基于虚拟化框架virtio上层实现软件框架,RPMsg总线是一种基于virtio的消息总线。Linux下的RPMsg核间通信,涉及多个Linux内核多个软件框架,包括virtio、remoteproc和mailbox,下图大致描述了各个软件框架在核间通信的关系:
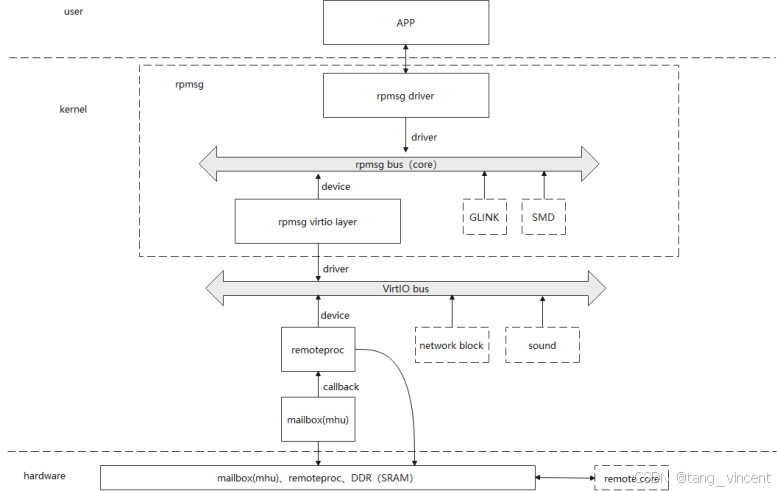
APP通过调用RPMsg提供的设备来进行核间通信,RPMsg driver向RPMsg bus总线注册driver,同时由virtio和RPMsg的中间适配层RPMsg virtio layer向注册对应device,匹配对应的driver,同时该层又向下注册了virtio driver,将virtio和RPMsg关联起来。Virtio的下层是remoteproc框架,该框架向上注册了virtio device,以和virtio driver匹配向上提供device硬件相关接口(这里硬件接口,包括remoteproc这个IP的接口和下层mailbox接口)。Mailbox框架向外提供client,remoteproce框架同时注册上层了一个mailbox client以和mailbox交互,mailbox向下同时提供了controller,让具体的硬件模块提供硬件操作接口。
此外,有些软件框架可以脱离其他层单独使用,例如mailbox,驱动开发者可自我注册client生成设备提供APP层直接进行核间通信,remoteproc通过sysfs暴露接口给APP层,用户可以直接控制远端处理器的状态(启动、停止、固件加载等)。而virtio则是一个与硬件无关的框架,可用于其他外设作为数据管理使用。
最新Linux内核,GLINK和SMD也向RPMsg bus注册了device,这两个协议是用于高通平台,本文不展述。
4 使用RPMsg进行核间通信
本节从实际使用角度,描述user空间,APP如何使用RPMsg进行核间通信。
4.1 RPMsg通信建立
4.1.1 使用名称服务建立通信
RPMsg使用前,有时需要建立一定条件,即在使用远端服务时,需要依赖远端发送服务到本地,本地建立服务(即是设备名称)后,user空间app才可打开设备进行通信,如下图是通信建立的大致流程:
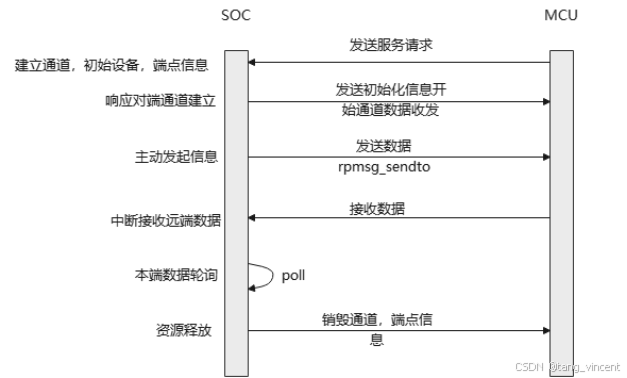
SOC在使用前,需要先收到远端服务请求,在本地建立RPMsg通道、端点和设备等信息,再反馈初始化信息给远端,双方才可进行通信。建立后,APP可主动发送数据,被动收数据或者主动沦陷,最后主动销毁通道。
在Linux内核代码,服务建立是kernel/drivers/rpmsg/rpmsg_ns.c文件完成,RPMsg device 层向上注册了ns的device,后续章节将深入代码解析该流程。
4.1.2 不用名称服务
最新的内核代码,也能在不使用名称服务情况下,直接建立端点进行通信,甚至脱离具体RPMsg通道建立端点来通信,这种情况下,需要双方手动登记通信的端点地址,如下图:
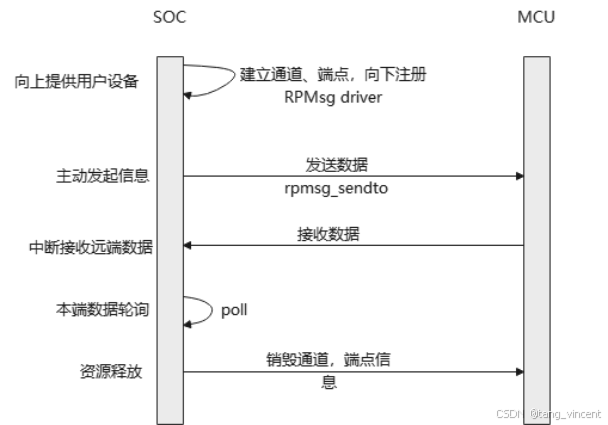
SOC侧在驱动加载时,直接建立通道和端点信息,之后进行正常通信,此时需要手动和远端登记好地址。
最新内核代码中,drivers/rpmsg/rpmsg_ctrl.c和drivers/rpmsg/rpmsg_char.c都是在不适用名称服务情况下直接进行通信,同时许多其他利用RPMsg框架进行核间通信的模块,都直接使用该方式,例如camera的核间通信等。
4.2 RPMsg应用过程
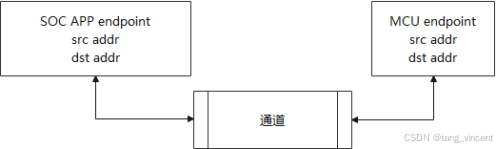
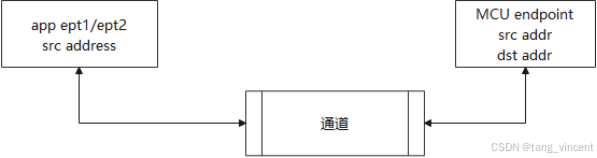
利用RPMsg核间通信过程:建立通道和端点同时绑定本地地址和远端地址,发送时带上本地地址,远端发送数据到本地时,也需要携带远端地址才能被本地端点使用,上送数据给应用层。
比较典型的应用,是一个通道两端各一个端点进行通信:
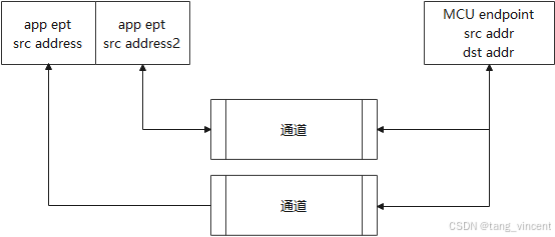
还可以一个通道多个端点
或者多通道多端点
4.3 应用层示例
在底层准备好后,应用层就能打开底层提供的设备进行核间通信。以/dev/rpmsg_ctrl0设备为例子,就是4.1.2提到的drivers/rpmsg/rpmsg_ctrl.c生成的设备,该RPMsg驱动支持生成多端点进行通信或者多通道,下面应用程序是使用流程:
#include
#include
#include
#include
#include
#include
#include
#include
#include "sstar_rpmsg.h"
int main(void)
{
struct ss_rpmsg_endpoint_info info;
char buffer[512];
char data[512];
int ret;
char devPath[256];
int fd, eptFd;
unsigned int index = 0x0;
memset(&info, 0, sizeof(info));
info.src = EPT_ADDR_MACRO(EPT_TYPE_CUSTOMER, 1);
info.dst = EPT_ADDR_MACRO(EPT_TYPE_CUSTOMER, 2);
snprintf(info.name, sizeof(info.name), "demo");
info.mode = RPMSG_MODE_RISCV;
info.target_id = 0;
fd = open("/dev/rpmsg_ctrl0", O_RDWR);
if (fd < 0)
{
perror("open");
return 0;
}
if (ioctl(fd, SS_RPMSG_CREATE_EPT_IOCTL, &info) < 0)//创建通道时携带端点地址
{
perror("ioctl");
return 0;
}
sleep(2);
snprintf(devPath, sizeof(devPath), "/dev/rpmsg%d", info.id);//打开创建端点时生成的设备
eptFd = open(devPath, O_RDWR);
if (eptFd < 0)
{
fprintf(stderr, "Failed to open endpoint!
");
return 0;
}
while (1)
{
snprintf(buffer, sizeof(buffer), "hello,world:0x%x
", index++);
ret = write(eptFd, buffer, strlen(buffer) + 1);//写数据
memset(data, 0, sizeof(data));
ret = read(eptFd, data, sizeof(data));//读数据
if (ret > 0)
printf("read ept:%d, %s
", ret, data);
else
printf("read ept error:%d
", ret);
}
return 0;
} 使用由rpmsg_ctrl.c注册生产的设备来使用rpmsg进行核间通信;先用 /dev/rpmsg_ctrl0 设备通过ioctrl生成端点 SS_RPMSG_CREATE_EPT_IOCT ,此时驱动将为进程生成 /dev/rpmsg X 设备用来核间通信使用,后续可以使用常用的文件操作方式访问该设备进行核间通信。
- "/dev/rpmg_ctrl0" to instantiate /dev/rpmsg0 sysfs device interface,
- "/dev/rpmg0" sysfs device interface for communication.
在后面章节,将介绍分析驱动如何提供接口给应用层。
5 RPMsg内核驱动源码解析
RPMsg内核驱动框架涉及到RPMsg框架、virtio框架、remoteproc子系统和mailbox子系统,下面逐一介绍这些框架。
5.1 RPMsg框架源码
5.1.1 源代码与功能
RPMsg源码位于Linux源码目录kernel/drivers/rpmsg/下,下图是一个RPMsg大致软件功能框图,主要涉及源文件为:
kernel/drivers/rpmsg/rpmsg_core.c rpmsg核心代码
kernel/drivers/rpmsg/virtio_rpmsg_bus.c virtio与rpmsg适配层
kernel/drivers/rpmsg/rpmsg_ctrl.c驱动应用
kernel/drivers/rpmsg/rpmsg_ns.c驱动应用
kernel/drivers/rpmsg/rpmsg_char.c驱动应用
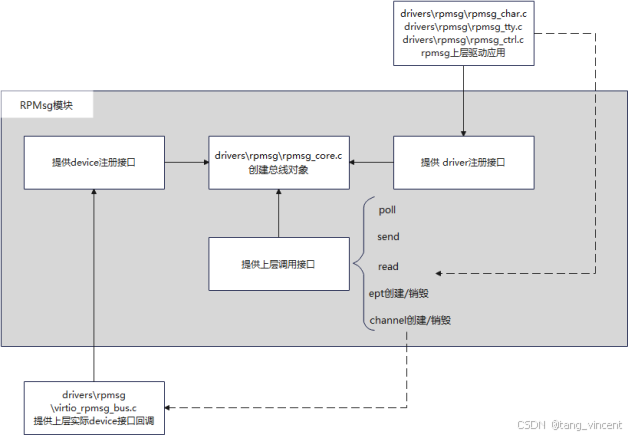
rpmsg_core.c创建了一个bus总线,驱动应用层(rpmsg_ctrl.c、rpmsg_ns.c、rpmsg_char.c)向下注册rpmsg_driver,同时注册字符设备暴露接口给应用层,virtio_rpmsg_bus.c文件向下注册了virtio driver,向上则注册rpmsg device,一旦和上层驱动应用的driver匹配,上层驱动应用即可通过device提供的接口访问到device层,即virtio_rpmsg_bus.c这一层,这是rpmsg bus主要功能,同时也支持多个device和driver的接入。
5.1.2 源码分析
先看bus总线的初始化,drivers/rpmsg/rpmsg_core.c文件里,内存加载时,会先调用bus_register注册一条总线,同时提供了device和driver的注册接口
static struct bus_type rpmsg_bus = {
.name = "rpmsg",
.match = rpmsg_dev_match,
.dev_groups = rpmsg_dev_groups,
.uevent = rpmsg_uevent,
.probe = rpmsg_dev_probe,
.remove = rpmsg_dev_remove,
};
static int __init rpmsg_init(void)
{
.....
ret = bus_register(&rpmsg_bus);
....
return ret;
}
postcore_initcall(rpmsg_init);
int __register_rpmsg_driver(struct rpmsg_driver *rpdrv, struct module *owner)
{
rpdrv->drv.bus = &rpmsg_bus;
rpdrv->drv.owner = owner;
return driver_register(&rpdrv->drv);
}
EXPORT_SYMBOL(__register_rpmsg_driver);
int rpmsg_register_device(struct rpmsg_device *rpdev)
{
return rpmsg_register_device_override(rpdev, NULL);
}
EXPORT_SYMBOL(rpmsg_register_device);当匹配到driver和device时,将调用rpmsg_dev_probe并调用driver的probe函数传入device对象。除了对总线的初始化,该文件提供的对外接口,最终都是调用传入device的回调。
Device的注册在drivers/rpmsg/rpmsg_core.c,该文件最开始注册了virtio(后续virtio章节分析),当virtio的driver和device匹配时,rpmsg_probe被调用,该函数则是根据上层驱动需求创建rpmsg device,具体可由驱动开发者实现。
static struct virtio_driver virtio_ipc_driver = {
.feature_table = features,
.feature_table_size = ARRAY_SIZE(features),
.driver.name = KBUILD_MODNAME,
.driver.owner = THIS_MODULE,
.id_table = id_table,
.probe = rpmsg_probe,
.remove = rpmsg_remove,
};
static int __init rpmsg_init(void)
{
...
ret = register_virtio_driver(&virtio_ipc_driver);
...
}
subsys_initcall(rpmsg_init);
static int rpmsg_probe(struct virtio_device *vdev)
{
...
rpdev_ctrl = rpmsg_virtio_add_ctrl_dev(vdev);//rpmsg_ctrl设备
err = rpmsg_ns_register_device(rpdev_ns);//名称服务设备
}该文件另外最大的功能,是提供device以及ept端点的回调给上层。
接下来分析最上层驱动应用,以4.3章节应用程序用的/dev/rpmsg_ctrl0设备来分析rpmsg驱动源码。该设备是由drivers/rpmsg/rpmsg_ctrl.c生成的。
在rpmsg_ctrl.c里,驱动初始化时调用rpmsg bus提供的driver注册接口注册了rpmsg driver,名为rpmsg_ctrl:
static struct rpmsg_driver rpmsg_ctrldev_driver = {
.probe = rpmsg_ctrldev_probe,
.remove = rpmsg_ctrldev_remove,
.drv = {
.name = "rpmsg_ctrl",
},
};
ret = register_rpmsg_driver(&rpmsg_ctrldev_driver);在drivers/rpmsg/virtio_rpmsg_bus.c,同样注册了一个名为rpmsg_ctrl的device:
rpmsg_probe
rpmsg_virtio_add_ctrl_dev
rpmsg_ctrldev_register_device
rpmsg_register_device_override(rpdev, "rpmsg_ctrl")(drivers/rpmsg/rpmsg_internal.h)
dev->bus = &rpmsg_bus;ret = device_add(dev);(kernel/drivers/rpmsg/rpmsg_core.c)当driver和device匹配后,platform调用driver的probe,添加一个rpmsg_ctrlx设备给上层调用:
static const struct file_operations rpmsg_ctrldev_fops = {
.owner = THIS_MODULE,
.open = rpmsg_ctrldev_open,
.release = rpmsg_ctrldev_release,
.unlocked_ioctl = rpmsg_ctrldev_ioctl,
.compat_ioctl = compat_ptr_ioctl,
};
static int rpmsg_ctrldev_probe(struct rpmsg_device *rpdev)
{
cdev_init(&ctrldev->cdev, &rpmsg_ctrldev_fops);
...
dev_set_name(&ctrldev->dev, "rpmsg_ctrl%d", ret);
...
ret = cdev_device_add(&ctrldev->cdev, &ctrldev->dev);
...
return ret;
}上层调用ioctrl创建ept时,会新创建一个rpmsgx设备,调用栈如下:
rpmsg_ctrldev_ioctl
rpmsg_chrdev_eptdev_create(drivers/rpmsg/rpmsg_char.c)
rpmsg_chrdev_eptdev_alloc->cdev_init(&eptdev->cdev, &rpmsg_eptdev_fops);
rpmsg_chrdev_eptdev_add
{
...
dev_set_name(dev, "rpmsg%d", ret);
ret = cdev_device_add(&eptdev->cdev, &eptdev->dev);
...
}
其中文件操作集rpmsg_eptdev_fops定义如下:
static const struct file_operations rpmsg_eptdev_fops = {
.owner = THIS_MODULE,
.open = rpmsg_eptdev_open,
.release = rpmsg_eptdev_release,
.read_iter = rpmsg_eptdev_read_iter,
.write_iter = rpmsg_eptdev_write_iter,
.poll = rpmsg_eptdev_poll,
.unlocked_ioctl = rpmsg_eptdev_ioctl,
.compat_ioctl = compat_ptr_ioctl,
};应用层在打开rpmsg0进行读写
写:
rpmsg_eptdev_write_iter
rpmsg_sendto:ept->ops->sendto(ept, data, len, dst);//调用端点绑定的回调
端点ept的来源
rpmsg_eptdev_open
{
ept = rpmsg_create_ept(rpdev, rpmsg_ept_cb, eptdev, eptdev->chinfo);
eptdev->ept = ept;
}
而在rpmsg_create_ept: rpdev->ops->create_ept(rpdev, cb, priv, chinfo)(drivers/rpmsg/rpmsg_core.c)调用的是device的ops,该device之前以分析在kernel/drivers/rpmsg/virtio_rpmsg_bus.c生成
static struct rpmsg_device *rpmsg_virtio_add_ctrl_dev(struct virtio_device *vdev)
{
struct rpmsg_device *rpdev_ctrl;
rpdev_ctrl->ops = &virtio_rpmsg_ops;
}
static const struct rpmsg_device_ops virtio_rpmsg_ops = {
.create_channel = virtio_rpmsg_create_channel,
.release_channel = virtio_rpmsg_release_channel,
.create_ept = virtio_rpmsg_create_ept,
.announce_create = virtio_rpmsg_announce_create,
.announce_destroy = virtio_rpmsg_announce_destroy,
};
virtio_rpmsg_create_ept
static struct rpmsg_endpoint *__rpmsg_create_ept(struct virtproc_info *vrp,
struct rpmsg_device *rpdev,
rpmsg_rx_cb_t cb,
void *priv, u32 addr)
{
int id_min, id_max, id;
struct rpmsg_endpoint *ept;
ept->ops = &virtio_endpoint_ops;
...
return ept;
}
static const struct rpmsg_endpoint_ops virtio_endpoint_ops = {
.destroy_ept = virtio_rpmsg_destroy_ept,
.send = virtio_rpmsg_send,
.sendto = virtio_rpmsg_sendto,
.send_offchannel = virtio_rpmsg_send_offchannel,
.trysend = virtio_rpmsg_trysend,
.trysendto = virtio_rpmsg_trysendto,
.trysend_offchannel = virtio_rpmsg_trysend_offchannel,
.get_mtu = virtio_rpmsg_get_mtu,
};
回到最开始的写函数
rpmsg_sendto:ept->ops->sendto(ept, data, len, dst);
即此时写调用的是drivers/rpmsg/virtio_rpmsg_bus.c下的virtio_rpmsg_sendto
其他send的函数同理
读
rpmsg_eptdev_read_iter
{
skb = skb_dequeue(&eptdev->queue);
}
static int rpmsg_ept_cb(struct rpmsg_device *rpdev, void *buf, int len,
void *priv, u32 addr)
{
skb_queue_tail(&eptdev->queue, skb);
}
ept = rpmsg_create_ept(rpdev, rpmsg_ept_cb, eptdev, eptdev->chinfo);
根据上述写的分析,这个rpmsg_create_ept最终调用drivers/rpmsg/virtio_rpmsg_bus.c下的
static struct rpmsg_endpoint *__rpmsg_create_ept(struct virtproc_info *vrp,
struct rpmsg_device *rpdev,
rpmsg_rx_cb_t cb,
void *priv, u32 addr)
{
ept->cb = cb;
}
该回调被绑定到端点上,等待其他地方调用。
该cb回调由以下流程调用
rpmsg_recv_done(注册到下层virtio,由下层调用,后面章节分析)
rpmsg_recv_single
{
ept->cb(ept->rpdev, msg->data, msg_len, ept->priv, __rpmsg32_to_cpu(little_endian, msg->src));
}以上便是rpmsg所有的代码功能,驱动开发者接触相对较多的是该层代码。
5.2 virtio介绍
5.2.1 virtio源码及virtio_queue原理介绍
Virtio源码位于Linux内核路径kernel/drivers/virtio/下,virtio在此最重要的功能就是其对缓冲区的管理:vring机制。
drivers/virtio/virtio_ring.c:vring提供相关操作接口
drivers/virtio/virtio.c:逻辑核心,包括bus总线初始化等
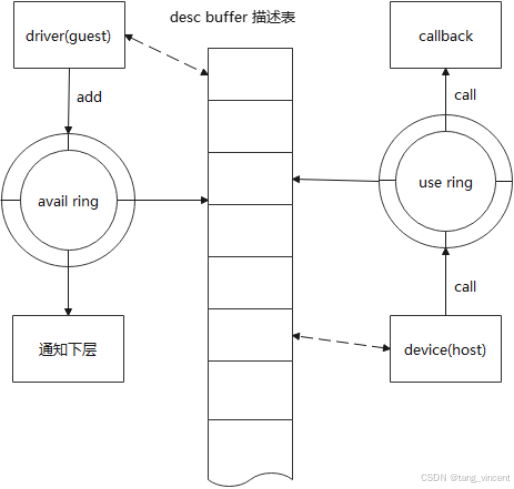
如下图是virtio对vring的管理方式,virtio对上对下分别区分guest和host的概念。Avail ring指guest用于发送数据的缓冲区,use ring指guest用于接收数据的缓冲区,两者都是用与记录当前可用数据在desc buffer的索引值,dsec buffer则记录了所有缓冲区的物理地址。
Guest负责对vring缓冲区初始化,初始化完成后,当guest要发送数据时,将在avail记录发送缓冲区索引值,随后通过下层device通知下层发送。当host有数据时,将数据拷贝(大部分硬件已完成)到可用的use ring缓冲区,被回调上层注册下来的接口,将数据上送给上层。
5.2.2 源码分析
先看drivers/virtio/virtio.c,文件同样注册bus,同时提供device和driver的注册接口。
static int virtio_init(void)
{
if (bus_register(&virtio_bus) != 0)
panic("virtio bus registration failed");
return 0;
}
core_initcall(virtio_init);
-------------------------
static struct bus_type virtio_bus = {
.name = "virtio",
.match = virtio_dev_match,
.dev_groups = virtio_dev_groups,
.uevent = virtio_uevent,
.probe = virtio_dev_probe,
.remove = virtio_dev_remove,
};
int register_virtio_driver(struct virtio_driver *driver)
{
/* Catch this early. */
BUG_ON(driver->feature_table_size && !driver->feature_table);
driver->driver.bus = &virtio_bus;
return driver_register(&driver->driver);
}
int register_virtio_device(struct virtio_device *dev)
{
err = device_add(&dev->dev);
if (err)
goto out_of_node_put;
return 0;
...
return err;
}当device和driver匹配成功,将调用probe函数以及driver的probe,传入device设备对象:
static int virtio_dev_probe(struct device *_d)
{
...
err = drv->probe(dev);
if (err)
goto err;
...
}该文件除了提供基础的bus初始化,其他都是无关紧要接口。
drivers/virtio/virtio_ring.c则是对vring管理提供了对外接口,包括接收数据通知上层,以及下发发送的通知回调等。
virtqueue_add_outbuf向vring添加一个可用的发送buffer
virtqueue_add_inbuf向vring添加一个可用的接收buffer
virtqueue_kick_prepare 通知前或者初始化前的准备(主要是内存资源初始化相关)
virtqueue_kick->virtqueue_notify 通知发送接口,当guest已经准备好数据后,调用该接口通知下层发送数据
vring_interrupt host接收到数据,调用该接口通知上层,该接口最终调用上层注册的rpmsg_recv_done函数
vring_new_virtqueue添加一个/多个virtqueue,初始化时调用
来看virtio跟上下层实例交互,先看guest注册virtio driver,签名分析过virtio driver的注册是在drivers/rpmsg/virtio_rpmsg_bus.c里。
static int __init rpmsg_init(void)
{
...
ret = register_virtio_driver(&virtio_ipc_driver);
...
}当匹配成功后,driver的probe被调用,在probe函数有几个比较重要的初始化:
static int rpmsg_probe(struct virtio_device *vdev)
{
vq_callback_t *vq_cbs[] = { rpmsg_recv_done, rpmsg_xmit_done };
static const char * const names[] = { "input", "output" };
struct virtqueue *vqs[2];
struct virtproc_info *vrp;
struct virtio_rpmsg_channel *vch = NULL;
struct rpmsg_device *rpdev_ns, *rpdev_ctrl;
/* We expect two virtqueues, rx and tx (and in this order) */
//根据名称创建两个virtio_queue,调用device提供的find_vqs回调
err = virtio_find_vqs(vdev, 2, vqs, vq_cbs, names, NULL);
if (err)
goto free_vrp;
vrp->rvq = vqs[0];
vrp->svq = vqs[1];
...
/* set up the receive buffers */
//根据当前buf数量,配置到vring中,这里配置的一般是mailbox使用的共享内存
for (i = 0; i < vrp->num_bufs / 2; i++) {
struct scatterlist sg;
void *cpu_addr = vrp->rbufs + i * vrp->buf_size;
rpmsg_sg_init(&sg, cpu_addr, vrp->buf_size);
err = virtqueue_add_inbuf(vrp->rvq, &sg, 1, cpu_addr,
GFP_KERNEL);
WARN_ON(err); /* sanity check; this can't really happen */
}
...
}在driver里,上层rpmsg bus发送数据
static int rpmsg_send_offchannel_raw(struct rpmsg_device *rpdev,
u32 src, u32 dst,
void *data, int len, bool wait)
{
struct virtio_rpmsg_channel *vch = to_virtio_rpmsg_channel(rpdev);
struct virtproc_info *vrp = vch->vrp;
struct device *dev = &rpdev->dev;
struct scatterlist sg;
struct rpmsg_hdr *msg;
int err;
...
/* grab a buffer */
msg = get_a_tx_buf(vrp);
if (!msg && !wait)
return -ENOMEM;
...
rpmsg_sg_init(&sg, msg, sizeof(*msg) + len);
mutex_lock(&vrp->tx_lock);
/* add message to the remote processor's virtqueue */
//将buffer添加vring中
err = virtqueue_add_outbuf(vrp->svq, &sg, 1, msg, GFP_KERNEL);
....
/* tell the remote processor it has a pending message to read */
//通知下层进行数据发送
virtqueue_kick(vrp->svq);
out:
mutex_unlock(&vrp->tx_lock);
return err;
}接下来是device的注册过程,device的注册由virtio与remoteproc的适配层实现drivers/remoteproc/remoteproc_virtio.c
hobot_rproc_vdsp_resume(hobot-drivers/remoteproc/hobot_remoteproc.c)
hobot_remoteproc_boot_vdsp
rproc_boot
rproc_fw_boot
rproc_start
static int rproc_start_subdevices(struct rproc *rproc)
{
struct rproc_subdev *subdev;
...
list_for_each_entry(subdev, &rproc->subdevs, node) {
if (subdev->start) {
ret = subdev->start(subdev);
if (ret)
goto unroll_registration;
}
}
...
}
------------------
drivers/remoteproc/remoteproc_virtio.c
static int rproc_virtio_probe(struct platform_device *pdev)
{
rvdev->subdev.start = rproc_vdev_do_start;
rproc_add_subdev(rproc, &rvdev->subdev);
}
rproc_add_virtio_dev:ret = register_virtio_device(vdev);
5.3 remoteproc介绍
5.3.1 remoteproc子系统
remoteproc源码在drivers/remoteproc/目录下,主要用来管理远程处理器启动、停止、固件加载等,围绕这些功能,remoteproc提供了不同的接口。
drivers/remoteproc/remoteproc_virtio.c:virtio和remoteproc适配层
hobot-drivers/remoteproc/hobot_remoteproc.c:厂商实现,mailbox和remoteproc适配层。
kernel/drivers/remoteproc/remoteproc_core.c:remoteproc核心代码
如下是remoteproc子系统的大致功能图,remoteproc_core.c是整个代码核心,向上提供virtio device注册进行virtio bus,和virtio层关联,提供remoteproc层的接口,同时初始化自己成为一个mailbox client,和下层mailbox通信关联,调用mailbox框架下的硬件接口。
5.3.2 remoteproc源码解析
关于remoteproc如何生成注册一个virtio device,在virito章节已介绍,在向上层注册完device后,上层driver即可访问到remoteproe层的接口,例如这里的config操作集,上层可回调操作集接口:
static int rproc_add_virtio_dev(struct rproc_vdev *rvdev, int id)
{
vdev->config = &rproc_virtio_config_ops,
}
static const struct virtio_config_ops rproc_virtio_config_ops = {
.get_features = rproc_virtio_get_features,
.finalize_features = rproc_virtio_finalize_features,
.find_vqs = rproc_virtio_find_vqs,
.del_vqs = rproc_virtio_del_vqs,
.reset = rproc_virtio_reset,
.set_status = rproc_virtio_set_status,
.get_status = rproc_virtio_get_status,
.get = rproc_virtio_get,
.set = rproc_virtio_set,
};以这里的rproc_virtio_find_vqs为例,前面分析到virtio driver的probe函数里调用函数virtio_find_vqs,该函数的实现是回调device里config操作集,即这里的rproc_virtio_find_vqs
include/linux/virtio_config.h
static inline
int virtio_find_vqs(struct virtio_device *vdev, unsigned nvqs,
struct virtqueue *vqs[], vq_callback_t *callbacks[],
const char * const names[],
struct irq_affinity *desc)
{
return vdev->config->find_vqs(vdev, nvqs, vqs, callbacks, names, NULL, desc);
}rproc_virtio_find_vqs则是初始化virtio_queue队列,同时绑定notify通知函数到vring中,上层发送时,将回调该函数通知到remoteproc层,而remoteproc层则调用下层mailbox硬件接口进行远端通知。
/* kick the remote processor, and let it know which virtqueue to poke at */
static bool rproc_virtio_notify(struct virtqueue *vq)
{
struct rproc_vring *rvring = vq->priv;
struct rproc *rproc = rvring->rvdev->rproc;
int notifyid = rvring->notifyid;
dev_dbg(&rproc->dev, "kicking vq index: %d
", notifyid);
rproc->ops->kick(rproc, notifyid);
return true;
}
static struct virtqueue *rp_find_vq(struct virtio_device *vdev,
unsigned int id,
void (*callback)(struct virtqueue *vq),
const char *name, bool ctx)
{
....
/*
* Create the new vq, and tell virtio we're not interested in
* the 'weak' smp barriers, since we're talking with a real device.
*/
vq = vring_new_virtqueue(id, num, rvring->align, vdev, false, ctx,
addr, rproc_virtio_notify, callback, name);
if (!vq) {
dev_err(dev, "vring_new_virtqueue %s failed
", name);
rproc_free_vring(rvring);
return ERR_PTR(-ENOMEM);
}
...
}rproc->ops->kick(rproc, notifyid) 的回调注册如下:
static struct rproc_ops hobot_vdsp_rproc_ops = {
.start = hobot_vdsp_rproc_start,
.stop = hobot_vdsp_rproc_stop,
.kick = hobot_vdsp_rproc_kick,
...
};
hobot_remoteproc_probe
localrproc = rproc_alloc(&pdev->dev, dev_name(&pdev->dev), &hobot_vdsp_rproc_ops, NULL, sizeof(struct hobot_rproc_vdsp_pdata));
rproc_alloc_ops
static int rproc_alloc_ops(struct rproc *rproc, const struct rproc_ops *ops)
{
//申请内存后拷贝ops内容,即外面传入的回调
rproc->ops = kmemdup(ops, sizeof(*ops), GFP_KERNEL);
if (!rproc->ops)
return -ENOMEM;
/* Default to rproc_coredump if no coredump function is specified */
if (!rproc->ops->coredump)
rproc->ops->coredump = rproc_coredump;
if (rproc->ops->load)
return 0;
/* Default to ELF loader if no load function is specified */
rproc->ops->load = rproc_elf_load_segments;
rproc->ops->parse_fw = rproc_elf_load_rsc_table;
rproc->ops->find_loaded_rsc_table = rproc_elf_find_loaded_rsc_table;
rproc->ops->sanity_check = rproc_elf_sanity_check;
rproc->ops->get_boot_addr = rproc_elf_get_boot_addr;
return 0;
}最终调用hobot_vdsp_rproc_kick函数
static void hobot_vdsp_rproc_kick(struct rproc *localrproc, int32_t vqid)
{
struct hobot_rproc_vdsp_pdata *pdata = localrproc->priv;
pdata->ipc_ops.trigger_interrupt(pdata);
}
static void vdsp_trigger_interrupt(void *priv)
{...
if (pdata->vdsp_is_stop_flag != 1) {
ret = mbox_send_message(pdata->mchan_rpmsg, tmp_data);
if (ret < 0) {
(void)dev_err(&pdata->hbrproc->dev, "[vdsp%d] mailbox notify failed: %d
",
pdata->device_index, ret);
}
} ...
}其中mbox_send_message是mailbox提供的接口,最终回调到mailbox层
最后来看下在remoteproc这层是如何最为一个mailbox client使用的,在hobot-drivers/remoteproc/hobot_remoteproc.c,对实际物理通道进行回调绑定:
hobot_remoteproc_probe
irq_init
static int32_t irq_init(struct platform_device *pdev)
{
//coverity[misra_c_2012_rule_11_5_violation:SUPPRESS], ## violation reason SYSSW_V_11.5_01
struct hobot_rproc_vdsp_pdata *pdata = (struct hobot_rproc_vdsp_pdata *)(
pdev->dev.driver_data);
int32_t dsp_id = pdata->device_index;
char str_vdsp_rpmsg_wq[VDSP_PATH_SIZE] = {0};
char str_vdsp_dump_wq[VDSP_PATH_SIZE] = {0};
char str_vdsp_async_wq[VDSP_PATH_SIZE] = {0};
int32_t ret = 0;
pdata->mclient_rpmsg.dev = &(pdev->dev);
pdata->mclient_rpmsg.tx_block = (bool)true;
pdata->mclient_rpmsg.tx_tout = MBOX_TIMEOUT;
pdata->mclient_rpmsg.knows_txdone = (bool)false;
pdata->mclient_rpmsg.rx_callback = hobot_rpmsg_handler;
pdata->mclient_rpmsg.tx_prepare = NULL;
pdata->mclient_rpmsg.tx_done = NULL;
pdata->mchan_rpmsg = mbox_request_channel(&pdata->mclient_rpmsg, 0);
if (IS_ERR(pdata->mchan_rpmsg)) {
dev_err(&pdev->dev, "vdsp%d get mailbox channel:rpmsg failed
", dsp_id);
return -EFAULT;
}
...
pdata->mclient_boot.dev = &(pdev->dev);
pdata->mclient_boot.tx_block = (bool)true;
pdata->mclient_boot.tx_tout = MBOX_TIMEOUT;
pdata->mclient_boot.knows_txdone = (bool)false;
pdata->mclient_boot.rx_callback = hobot_boot_handler;
pdata->mclient_boot.tx_prepare = NULL;
pdata->mclient_boot.tx_done = NULL;
pdata->mchan_boot = mbox_request_channel(&pdata->mclient_boot, 1);
if (IS_ERR(pdata->mchan_boot)) {
mbox_free_channel(pdata->mchan_rpmsg);
dev_err(&pdev->dev, "vdsp%d get mailbox channel:boot failed
", dsp_id);
return -EFAULT;
}
。。。
pdata->mclient_log.dev = &(pdev->dev);
pdata->mclient_log.tx_block = (bool)true;
pdata->mclient_log.tx_tout = MBOX_TIMEOUT;
pdata->mclient_log.knows_txdone = (bool)false;
pdata->mclient_log.rx_callback = hobot_log_handler;
pdata->mclient_log.tx_prepare = NULL;
pdata->mclient_log.tx_done = NULL;
pdata->mchan_log = mbox_request_channel(&pdata->mclient_log, 2);
if (IS_ERR(pdata->mchan_log)) {
mbox_free_channel(pdata->mchan_rpmsg);
mbox_free_channel(pdata->mchan_boot);
dev_err(&pdev->dev, "vdsp%d get mailbox channel:log failed
", dsp_id);
return -EFAULT;
}
...
}
5.4 mailbox 框架
5.4.1 mailbox源码介绍
mailbox源码在Linux源码下的kernel/drivers/mailbox/
kernel/drivers/mailbox/mailbox.c: mailbox框架核心代码
hobot-drivers/mailbox/mbox/os/kernel/mbox_os.c:mailbox 硬件模块代码,注册实现controller。
mailbox为外层提供了controller和client两者,controller为mailbox框架提供硬件操作接口,client作为上层使用方,将通过controller来调用硬件操作相关接口,如下是mailbox软件框架图:
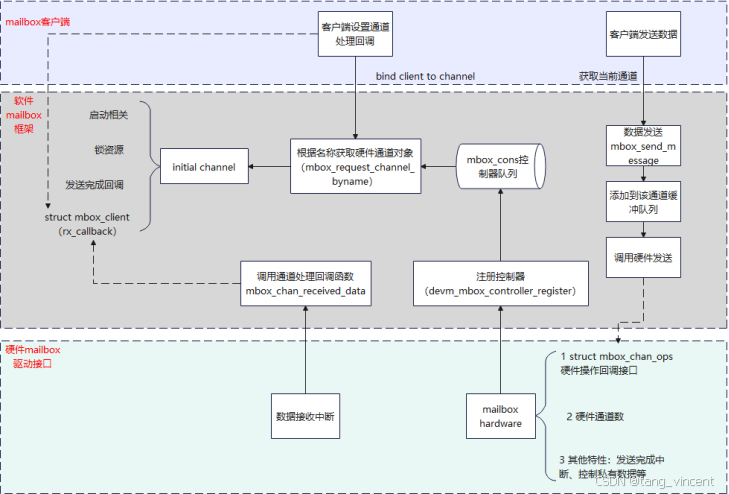
Mailbox内部维护了controller控制队列,外层通过接口注册的controller将被放到该队列中,这意味者,mailbox 框架支持多个硬件mailbox同时接入,用户作为client时,将绑定每个硬件chan的回调,下层收到chan数据时,将根据chan的编号,调用不同注册回调,在数据接收上,当mailbox硬件模块收到数据时进入中断,此时调用mbox_chan_received_data通知mailbox框架,mailbox框架将进行上层回调直到将数据上送给上层。在发送数据时,上层将调用mailbox的mbox_send_message通知mailbox框架发送中断给远端,实际该接口将回调controller注册的回调硬件接口。
5.4.2 mailbox框架源码解析
Mailbox的client端在上节已经分析了,来看下mailbox controller是如何注册的,mailbox的controller由硬件驱动模块来注册hobot-drivers/mailbox/mbox/os/kernel/mbox_os.c:
static int32_t hb_pl320_probe(struct platform_device *pdev)
{
int32_t err;
struct device *dev = &pdev->dev;
struct pl320_mbox *mbox;
struct hb_pl320_dev *mbox_pm = NULL;
mbox->dev = dev;
mbox->controller.dev = dev;
mbox->controller.chans = mbox->chan;
mbox->controller.num_chans = MAX_CHAN_PER_IPCM;
mbox->controller.ops = &pl320_chan_ops;
mbox->controller.of_xlate = pl320_chan_xlate;
mbox->controller.txdone_irq = true;
mbox->controller.txdone_poll = false;
mbox_pm = (struct hb_pl320_dev *)dev_get_drvdata(&pdev->dev);
mbox_pm->mbox = mbox;
...
err = devm_mbox_controller_register(dev, &mbox->controller);
if (err) {
dev_err(dev, "Failed to register mailboxes %d
", err);
iounmap((void *)mbox->base);
return err;
}
...
dev_info(dev, "PL320 Mailbox registered
");
return 0;
}
struct mbox_chan_ops pl320_chan_ops = {
.send_data = pl320_send_data,
.startup = pl320_startup,
.shutdown = pl320_shutdown,
.flush = pl320_flush,
};同时提供了硬件操作回调集:pl320_chan_ops
以发送数据为例,前面分析到在remoproce发送数据回调的kick,最终调用到
vdsp_trigger_interrupt -> mbox_send_message
mbox_send_message定义在drivers/mailbox/mailbox.c
int mbox_send_message(struct mbox_chan *chan, void *mssg)
{
int t;
if (!chan || !chan->cl)
return -EINVAL;
t = add_to_rbuf(chan, mssg);
if (t < 0) {
dev_err(chan->mbox->dev, "Try increasing MBOX_TX_QUEUE_LEN
");
return t;
}
msg_submit(chan);
...
return t;
}
static void msg_submit(struct mbox_chan *chan)
{
....
data = chan->msg_data[idx];
if (chan->cl->tx_prepare)
chan->cl->tx_prepare(chan->cl, data);
/* Try to submit a message to the MBOX controller */
err = chan->mbox->ops->send_data(chan, data);//回调controller的回调,即硬件接口
if (!err) {
chan->active_req = data;
chan->msg_count--;
}
...
}根据前面分析的controller注册生成,可见此时调到mailbox提供的硬件操作接口。
数据发送过程中,mailbox先注册硬件中断和绑定中断服务函数hobot-drivers/mailbox/mbox/os/kernel/mbox_os.c
hb_pl320_probe
static int32_t get_mbox_dev_resource(struct platform_device *pdev, struct pl320_mbox *mbox)
{
...
for (i = 0; i < mbox->num_mbox_chan; i++){
mchan = pchan + i;
mchan->irq = (uint32_t)platform_get_irq(pdev, (uint32_t)i);
mchan->parent = mbox;
mbox->chan[i + offset].con_priv = (void *)mchan;
...
err = devm_request_threaded_irq(dev, mchan->irq,
hb_mbox_handler,
hb_mbox_softirq,
IRQF_ONESHOT,
dev_name(dev),
(void *)&mbox->chan[i + offset]);
if (err) {
...
return err;
}
spin_lock_init(&mchan->irq_spinlock);
spin_lock_init(&mchan->flush_spinlock);
mutex_init(&mchan->client_lock);
}
}
static irqreturn_t hb_mbox_softirq(int irq, void *arg)
{
...
(void)mbox_chan_received_data(chan, mchan->rx_data);
...
}在中断服务函数里,调用mailbox框架接口 mbox_chan_received_data ,通知上层接收数据
void mbox_chan_received_data(struct mbox_chan *chan, void *mssg)
{
/* No buffering the received data */
if (chan->cl->rx_callback)
chan->cl->rx_callback(chan->cl, mssg);
}回调client的rx_callback,就是前面分析的绑定通道回调过程。
6 收发数据流程总结
接下来整体过一遍收发数据的过程。
6.1 接收数据过程调用栈
接收数据过程,以J6平台代码流程为例,从硬件接收->上层接收逐层分析。
hb_pl320_probe
get_mbox_dev_resource 注册中断服务hb_mbox_softirq
hb_mbox_softirq
mbox_chan_received_data 回调client 的rx_callback->hobot_rpmsg_handler
hobot_rpmsg_handler 通知线程completion_notify_rpmsg
hobot_remoteproc_rpmsg_work线程被唤醒
hobot_remoteproc_rpmsg_work_cb
rproc_vq_interrupt
vring_interrupt 最终调用struct virtqueue vq 里的callback回调,该回调在初始化struct virtqueue时传入
rpmsg_recv_done(rpmsg_probe->virtio_find_vqs->(vdev->config->find_vqs) rproc_virtio_find_vqs->rp_find_vq
->vring_new_virtqueue->__vring_new_virtqueue-> vq->vq.callback = callback)
rpmsg_recv_single 调用端点绑定的回调ept->cb,该回调在端点初始化时传入
rpmsg_ept_cb(rpmsg_eptdev_open->rpmsg_create_ept时传入了该回调)
最终将buf放入队列skb_queue_tail(&eptdev->queue, skb);
上层调用read时,rpmsg_eptdev_read_iter被调用
skb = skb_dequeue(&eptdev->queue);//冲skb队列取数据下图是stm32-157平台下的接收数据过程

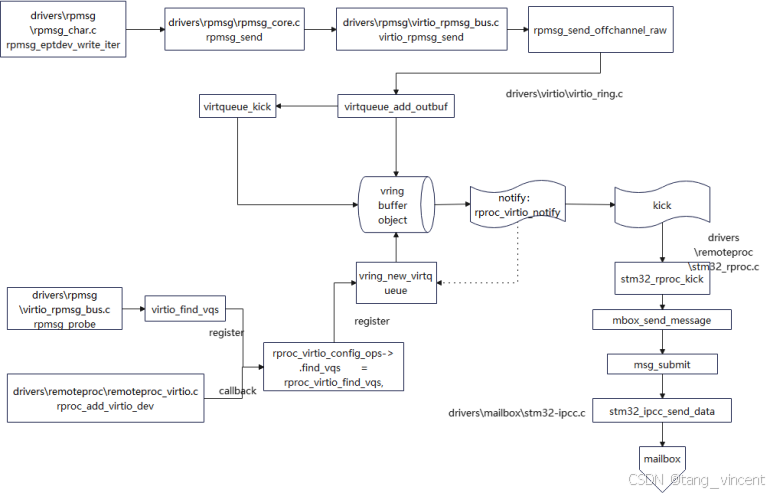
6.2 发送数据过程调用栈
数据发送过程,同样先以J6平台为例,这次从上层开始往下分析
应用层read
rpmsg_eptdev_write_iter
rpmsg_sendto 最终调用端点绑定的send ept->ops->sendto,由端点初始化是传入
virtio_rpmsg_sendto (rpmsg_eptdev_open->rpmsg_create_ept->virtio_rpmsg_create_ept->__rpmsg_create_ept->virtio_endpoint_ops->virtio_rpmsg_sendto)
rpmsg_send_offchannel_raw
virtqueue_add_outbuf
virtqueue_kick
virtqueue_notify 调用vq->notify回调,该回调在初始化struct virtqueue时传入
rproc_virtio_notify(rpmsg_probe->virtio_find_vqs->(vdev->config->find_vqs) rproc_virtio_find_vqs->rp_find_vq
->vring_new_virtqueue->传入rproc_virtio_notify),该函数最终调用struct rproc *rproc的ops下kick回调。
hobot_vdsp_rproc_kick(hobot_remoteproc_probe->rproc_alloc传入hobot_vdsp_rproc_ops->rproc_alloc_ops->rproc->ops = kmemdup(ops, sizeof(*ops), GFP_KERNEL);)
trigger_interrupt:vdsp_trigger_interrupt
mbox_send_message
msg_submit:chan->mbox->ops->send_data
pl320_chan_ops:pl320_send_data 写寄存器,触发对端中断通知对端下面是stm32-157的写调用栈流程:
6.3 收发数据buffer处理过程
6.3.1 J6缓冲区处理流程
- 共享缓冲区的获取以及virtio_queue 创建
queue的初始化kernel/drivers/rpmsg/virtio_rpmsg_bus.c的probe发起的
rpmsg_probe -> virtio_find_vqs 该函数回调到virtio device的config集回调rproc_virtio_find_vqs
rproc_virtio_find_vqs ->rp_find_vq->vring_new_virtqueue,这个vring_new_virtqueue传入了共享内存地址,用来建立vring buffer缓冲区:
static struct virtqueue *rp_find_vq(struct virtio_device *vdev,
unsigned int id,
void (*callback)(struct virtqueue *vq),
const char *name, bool ctx)
{
struct rproc_vdev *rvdev = vdev_to_rvdev(vdev);
void *addr;
...
rvring = &rvdev->vring[id];
num = rvring->num;
#if defined(CONFIG_HOBOT_REMOTEPROC) || defined(CONFIG_HOBOT_REMOTEPROC_MODULE)
if (rproc->fix_map_mode) {
addr = rvring->va;
memset_io(addr, 0, size);
} else {
addr = mem->va;
memset(addr, 0, size);
}
#else
addr = mem->va;
memset(addr, 0, size);
#endif
...
vq = vring_new_virtqueue(id, num, rvring->align, vdev, false, ctx,
addr, rproc_virtio_notify, callback, name);
//从上面流程代码,推出addr来自vdev指向的rvdev->vring[id]
//vdev是struct virtio_device,virtio device由下层注册
}
Virtio Device 注册流程参考接下来是device的注册过程
在rproc_virtio_probe中实现了virtio device指向struct rproc_vdev,以及vdev里vring数据来源
static int rproc_virtio_probe(struct platform_device *pdev)
{
struct device *dev = &pdev->dev;
struct rproc_vdev_data *rvdev_data = dev->platform_data;
struct rproc_vdev *rvdev;
struct rproc *rproc = container_of(dev->parent, struct rproc, dev);
struct fw_rsc_vdev *rsc;
int i, ret;
if (!rvdev_data)
return -EINVAL;
rvdev = devm_kzalloc(dev, sizeof(*rvdev), GFP_KERNEL);
if (!rvdev)
return -ENOMEM;
rvdev->id = rvdev_data->id;
rvdev->rproc = rproc;
rvdev->index = rvdev_data->index;
...
rsc = rvdev_data->rsc;// rsc数据来自platform device私有数据
...
platform_set_drvdata(pdev, rvdev);
rvdev->pdev = pdev;
...
/* parse the vrings */
for (i = 0; i < rsc->num_of_vrings; i++) {
ret = rproc_parse_vring(rvdev, rsc, i);
if (ret)
return ret;
}
}
再看rproc_parse_vring,可知vring数据来自rsc
int
rproc_parse_vring(struct rproc_vdev *rvdev, struct fw_rsc_vdev *rsc, int i)
{
struct rproc *rproc = rvdev->rproc;
struct device *dev = &rproc->dev;
struct fw_rsc_vdev_vring *vring = &rsc->vring[i];
struct rproc_vring *rvring = &rvdev->vring[i];
....
rvring->num = vring->num;
rvring->align = vring->align;
rvring->rvdev = rvdev;
#if defined(CONFIG_HOBOT_REMOTEPROC) || defined(CONFIG_HOBOT_REMOTEPROC_MODULE)
if (rproc->fix_map_mode) {
rvring->vring_size = vring->vring_size;
rvring->da = vring->da;
if (i == 0)
rvdev->buffer_phy_addr = vring->da +
rsc->num_of_vrings * vring->vring_size;
}
else {
rvdev->buffer_phy_addr = 0;
}
#endif
return 0;
}
从上面分析知,vring的缓冲区地址,来自virtio device的platform_data平台数据里的rsc
分析platfrom里rsc数据由来
static int rproc_fw_boot(struct rproc *rproc, const struct firmware *fw)
{
struct device *dev = &rproc->dev;
const char *name = rproc->firmware;
...
/* Load resource table, core dump segment list etc from the firmware */
ret = rproc_parse_fw(rproc, fw);//解析固件头信息,这里包含了resource_table,记录了共享内存地址
....
/* handle fw resources which are required to boot rproc */
//调用rproc_loading_handlers所有回调,其中rproc_handle_vdev出入了上述分析platfrom里rsc
ret = rproc_handle_resources(rproc, rproc_loading_handlers);
if (ret) {
dev_err(dev, "Failed to process resources: %d
", ret);
goto clean_up_resources;
}
....
return ret;
}
//下面函数传入了platform的private数据,该函数被上面函数调用
static int rproc_handle_vdev(struct rproc *rproc, void *ptr,
int offset, int avail)
{
struct fw_rsc_vdev *rsc = ptr;
...
rvdev_data.id = rsc->id;
rvdev_data.index = rproc->nb_vdev++;
rvdev_data.rsc_offset = offset;
rvdev_data.rsc = rsc;
/*
* When there is more than one remote processor, rproc->nb_vdev number is
* same for each separate instances of "rproc". If rvdev_data.index is used
* as device id, then we get duplication in sysfs, so need to use
* PLATFORM_DEVID_AUTO to auto select device id.
*/
pdev = platform_device_register_data(dev, "rproc-virtio", PLATFORM_DEVID_AUTO, &rvdev_data,
sizeof(rvdev_data));
...
return 0;
}
/* handle firmware resource entries before booting the remote processor */
static int rproc_handle_resources(struct rproc *rproc,
rproc_handle_resource_t handlers[RSC_LAST])
{
struct device *dev = &rproc->dev;
rproc_handle_resource_t handler;
int ret = 0, i;
if (!rproc->table_ptr)
return 0;
for (i = 0; i < rproc->table_ptr->num; i++) {
int offset = rproc->table_ptr->offset[i];
struct fw_rsc_hdr *hdr = (void *)rproc->table_ptr + offset;//rsc的数据最终来自rporc->table_ptr.
int avail = rproc->table_sz - offset - sizeof(*hdr);
void *rsc = (void *)hdr + sizeof(*hdr);
...
if (hdr->type >= RSC_VENDOR_START &&
hdr->type <= RSC_VENDOR_END) {
...
handler = handlers[hdr->type];
if (!handler)
continue;
ret = handler(rproc, rsc, offset + sizeof(*hdr), avail);
if (ret)
break;
}
return ret;
}
从上面函数知道了rsc数据最终来自table_ptr,该数据由固件解析函数获取
rproc_parse_fw->rproc_elf_load_rsc_table- 下面流程图是整个buffer数据流程图,在获取到共享内存,初始化到vring后,各层可利用vring,进行在RPMsg驱动层之前的无拷贝动作。

6.3.2 stm32-mp157缓冲区处理流程
下图流程图,总结了stm32-mp157的缓冲区处理流程,相对于j6平台,对共享内存的处理简单了很多,直接从设备树读取预留内存后,配置初始化到vring中,其他流程均和j6平台一致。
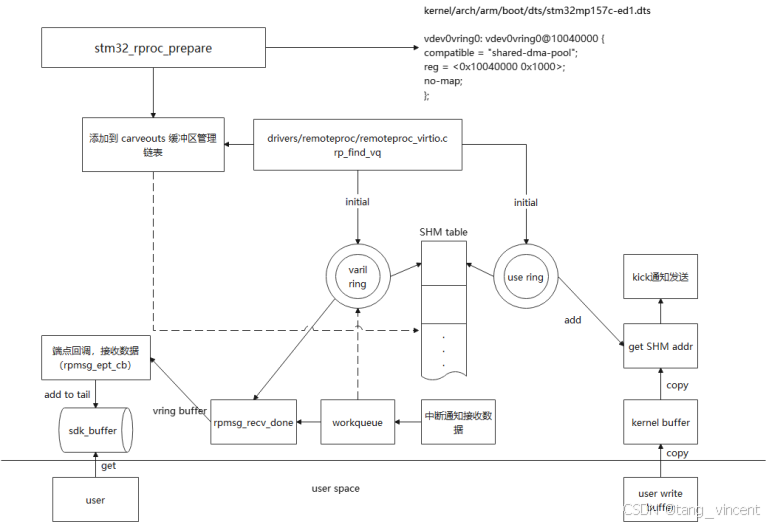
6.3.3 缓冲区处理
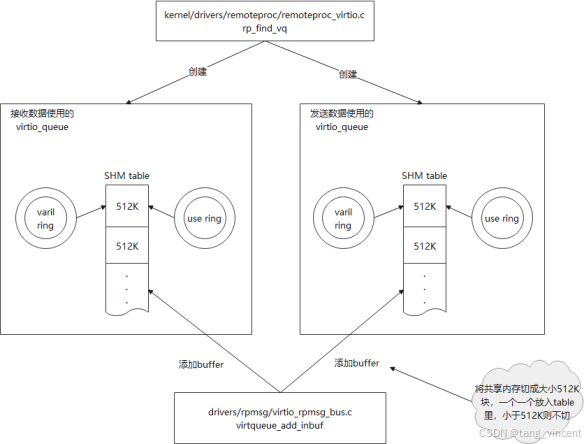
在RPMsg框架中,virito的vring缓冲区,单个最大默认是512K,如果分配的内存大于512K,virtio_queue会将其分割成几个缓冲区块,记录在table里,这意味着用户每次单次都不能超过512K。下图是实际处理过程示意图,实际过程中,virtio driver(virtio_rpmsg_bus.c)会创建两个virtio_queue,一个用于发送,一个用于接收。
7 附录
Linux RPMsg framework overview - stm32mpu
J6 document
kernel/drivers/mailbox/mailbox-test.c
kernel/tools/virtio/virtio_test.c
kernel/tools/virtio/vringh_test.c