
工业相机图像一般保存为什么格式?附 海康/Basler/堡盟 C# & C++ 保存代码!在部署一套机器视觉系统时,你是否曾纠结:“该用

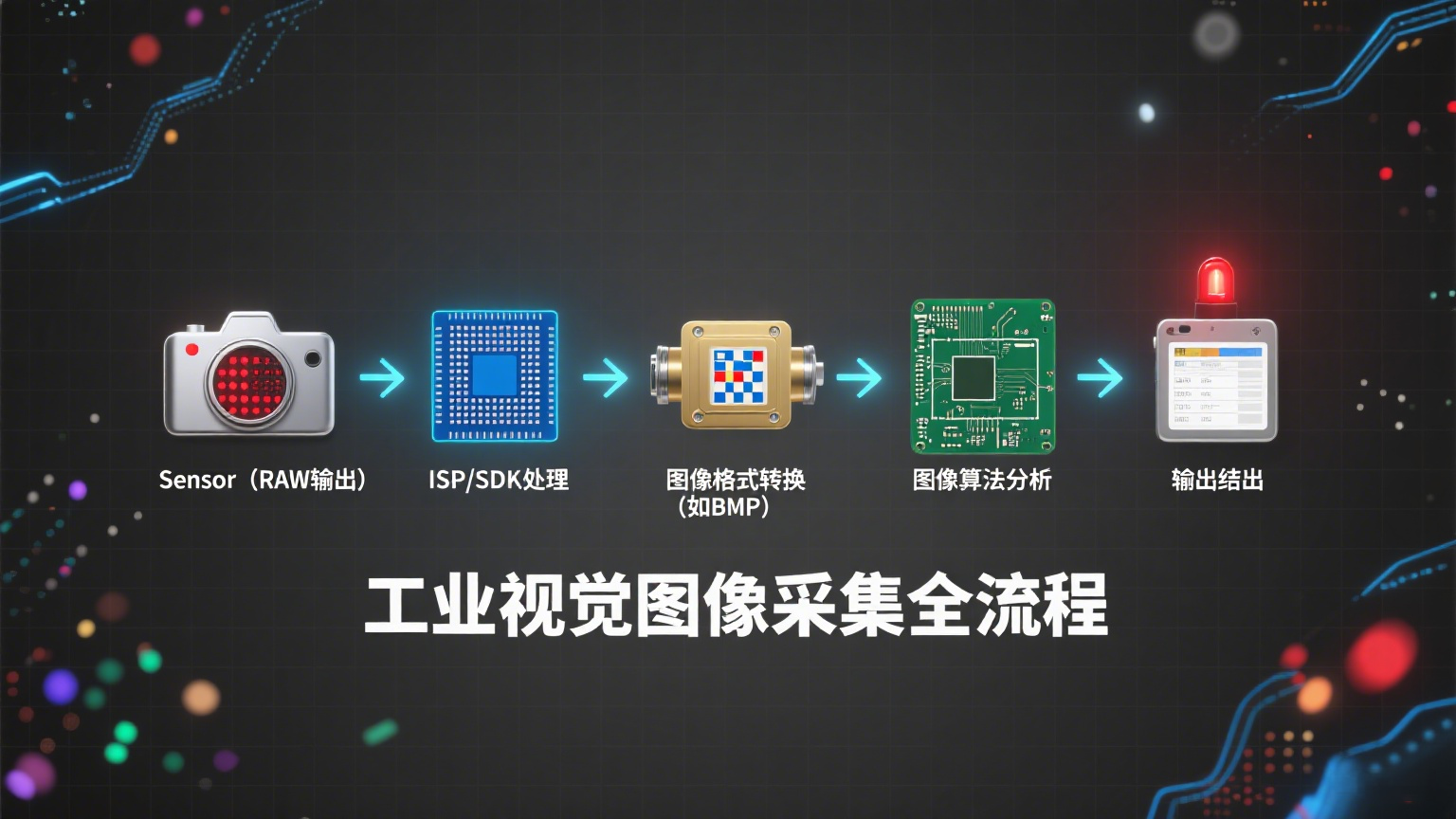
工业相机图像一般保存为什么格式?附 海康/Basler/堡盟 C# & C++ 保存代码!在部署一套机器视觉系统时,你是否曾纠结:“该用
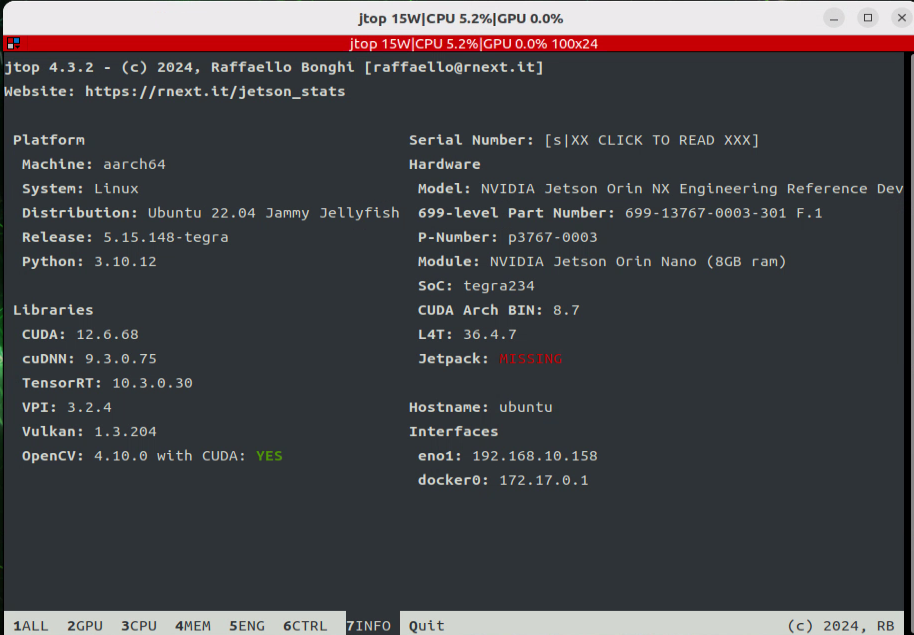
背景:想在无人机上用深度相机跑vins+yolo,此前做过t265(已停产)+d435i的方案,趁着做毕设打算做点新的:单

1. 安装RealSense SDK和ROS2驱动 1.1 安装依赖 sudo apt updatesudo apt install -y git cmake libssl-dev libusb-1.0-0-dev
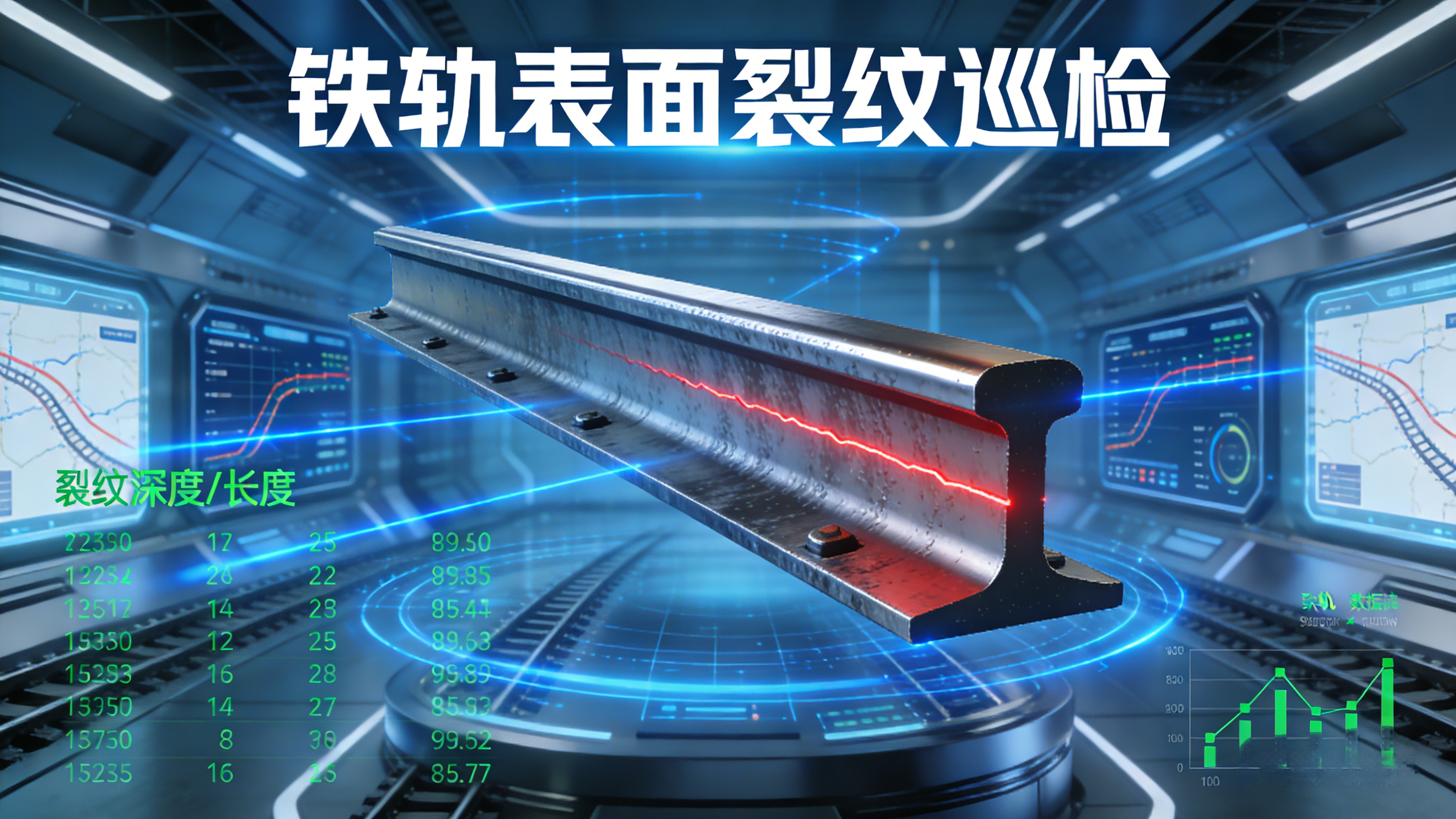
铁轨表面裂纹巡检:提升铁路安全监测能力的 7 个关键技术,附 OpenCV+Halcon 实战代码! 🎯 铁轨表面裂纹巡检:提升
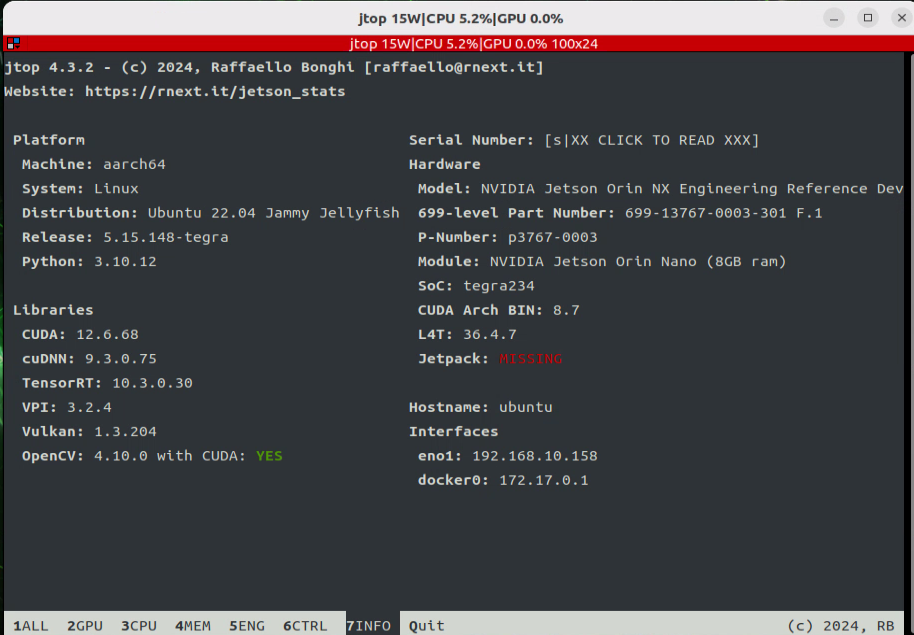
背景:想在无人机上用深度相机跑vins+yolo,此前做过t265(已停产)+d435i的方案,趁着做毕设打算做点新的:单
1. 安装RealSense SDK和ROS2驱动 1.1 安装依赖 sudo apt updatesudo apt install -y git cmake libssl-dev libusb-1.0-0-dev

GPUImage3x3ConvolutionFilter 代码全解析本文将逐行解析 GPUImage3x3ConvolutionFilter.java 代码,讲解其核心逻辑、代码含
1. 安装RealSense SDK和ROS2驱动 1.1 安装依赖 sudo apt updatesudo apt install -y git cmake libssl-dev libusb-1.0-0-dev

随着数据中心和企业级网络的高速发展,对线束与电缆组件的稳定性、信号完整性和可靠性提出了更高的要求。Amphenol ICC (Commerc
