
在Ubuntu18.04上部署XTDRone已经很成熟了,基本上没什么坑,但为了ros-melodic是基于python2.7的,而pytorch是python3起步的,为

在Ubuntu18.04上部署XTDRone已经很成熟了,基本上没什么坑,但为了ros-melodic是基于python2.7的,而pytorch是python3起步的,为
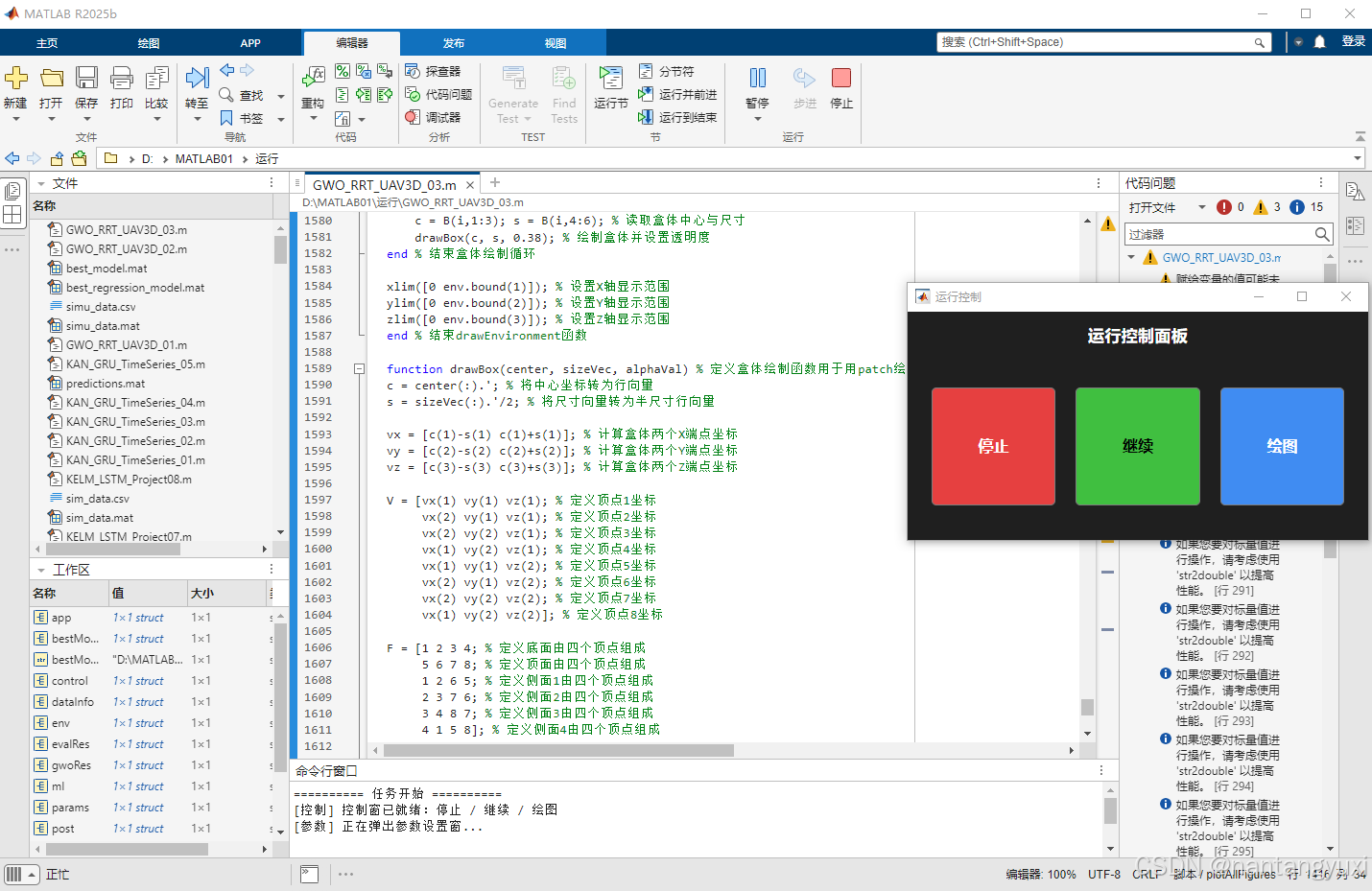
有图有真相 请注意所有代码结构内容都在这里了 这个只是有些汉字和字母做了替代 未替代内容可以详谈 请直接联系博主本人或者访问

Ubuntu 22.04 上搭建「四轴无人机(四旋翼)虚拟仿真环境」的完整不踩坑流程。整体采用: ROS 2:Humble(Ubuntu 22.04 官方主

无人机落水钓鱼数据集 README 数据集核心信息表 信息类别详细说明类别数量及名称4 类,分别为钓鱼伞(DiaoYuSan)、水边钓

数据集说明文档 往期热门主题 主页搜两字"关键词"直达 代码数据获取: 获取方式:***文章底部卡片扫码获取*** . 覆盖了YOLO相
数据集说明文档 往期热门主题 主页搜两字"关键词"直达 代码数据获取: 获取方式:***文章底部卡片扫码获取*** . 覆盖了YOLO相


在Ubuntu18.04上部署XTDRone已经很成熟了,基本上没什么坑,但为了ros-melodic是基于python2.7的,而pytorch是python3起步的,为
