
最近不少小伙伴私信问 PX4 结合 Mid360 激光雷达和 Tare Planner 的环境搭建问题,索性整理了一份保姆级实战教程,基于 Ubuntu2

最近不少小伙伴私信问 PX4 结合 Mid360 激光雷达和 Tare Planner 的环境搭建问题,索性整理了一份保姆级实战教程,基于 Ubuntu2
最近不少小伙伴私信问 PX4 结合 Mid360 激光雷达和 Tare Planner 的环境搭建问题,索性整理了一份保姆级实战教程,基于 Ubuntu2
最近不少小伙伴私信问 PX4 结合 Mid360 激光雷达和 Tare Planner 的环境搭建问题,索性整理了一份保姆级实战教程,基于 Ubuntu2

最近做课题要实现使用激光雷达作为px4外部定点数据,ros1的配置很多而ros2少的感人。踩了很多坑后终于搞定了,这篇文章用来记录
文章目录 系统环境安装依赖PX4 安装老版本安装测试环境变量添加版本查看 安装MAVROS(二进制安装非源码安装)第二种方法测
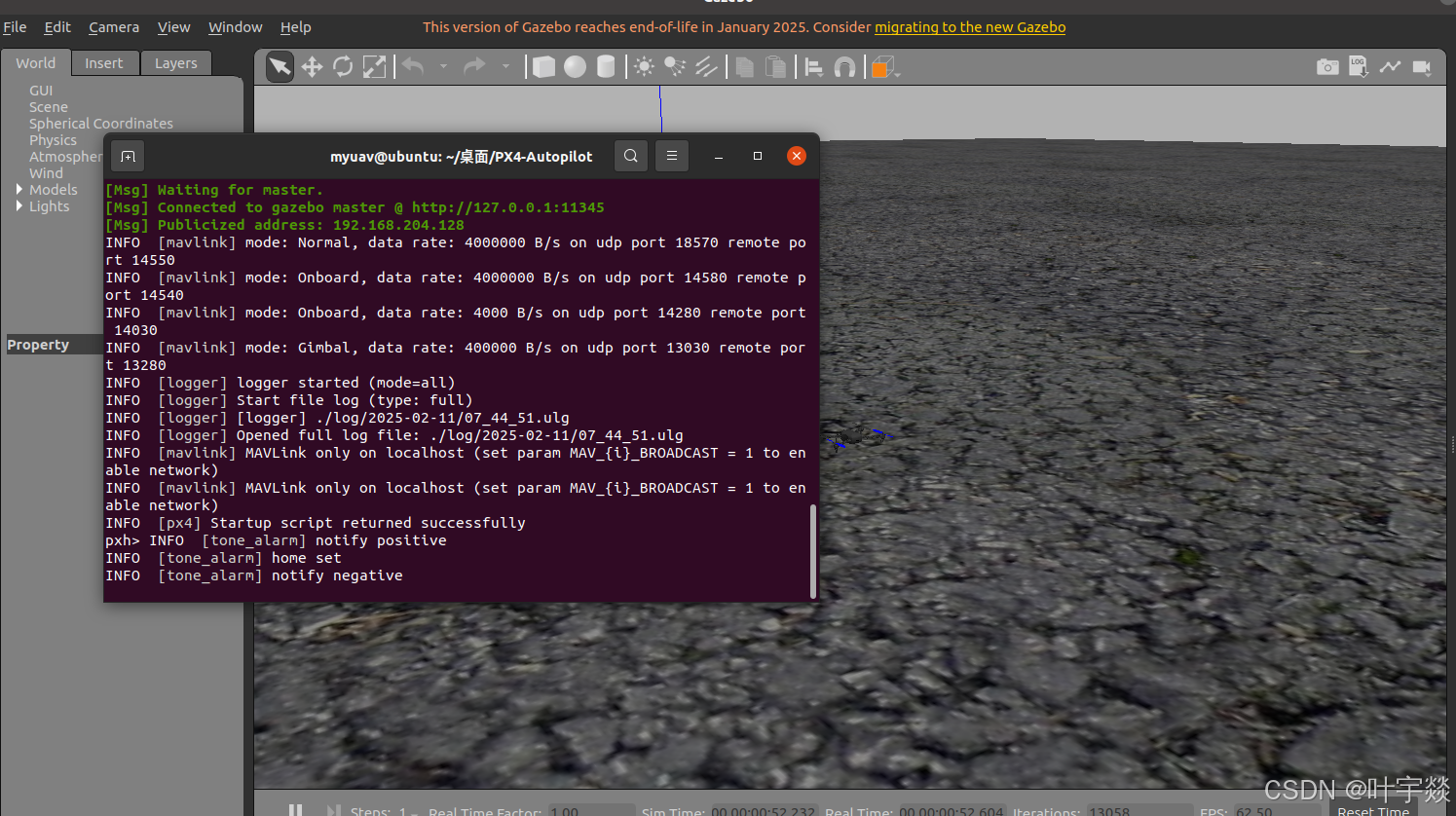
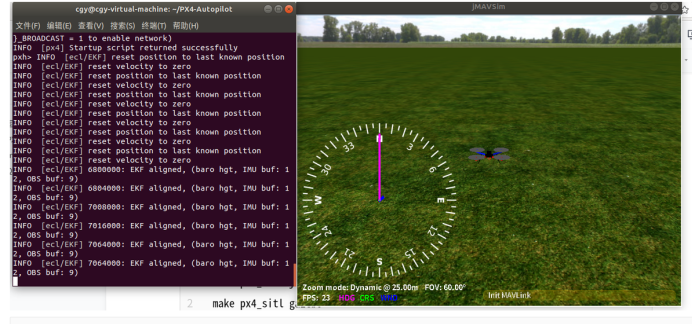
目录 前言 一、安装ROS 二、安装PX4 编译 三、QGC安装 四、安装MAVROS 命令记得加sudo! 前言 在安装ubuntu20.04+ROS+Gazeb
文章目录 系统环境安装依赖PX4 安装老版本安装测试环境变量添加版本查看 安装MAVROS(二进制安装非源码安装)第二种方法测
目录 前言 一、安装ROS 二、安装PX4 编译 三、QGC安装 四、安装MAVROS 命令记得加sudo! 前言 在安装ubuntu20.04+ROS+Gazeb
