
1. 安装RealSense SDK和ROS2驱动 1.1 安装依赖 sudo apt updatesudo apt install -y git cmake libssl-dev libusb-1.0-0-dev


1. 安装RealSense SDK和ROS2驱动 1.1 安装依赖 sudo apt updatesudo apt install -y git cmake libssl-dev libusb-1.0-0-dev

网上对于ROS2复现Fast_livo2的教程很少,本人也是历尽挫折才成功,特此记录下复现过程以及一些关键细节。 系统环境
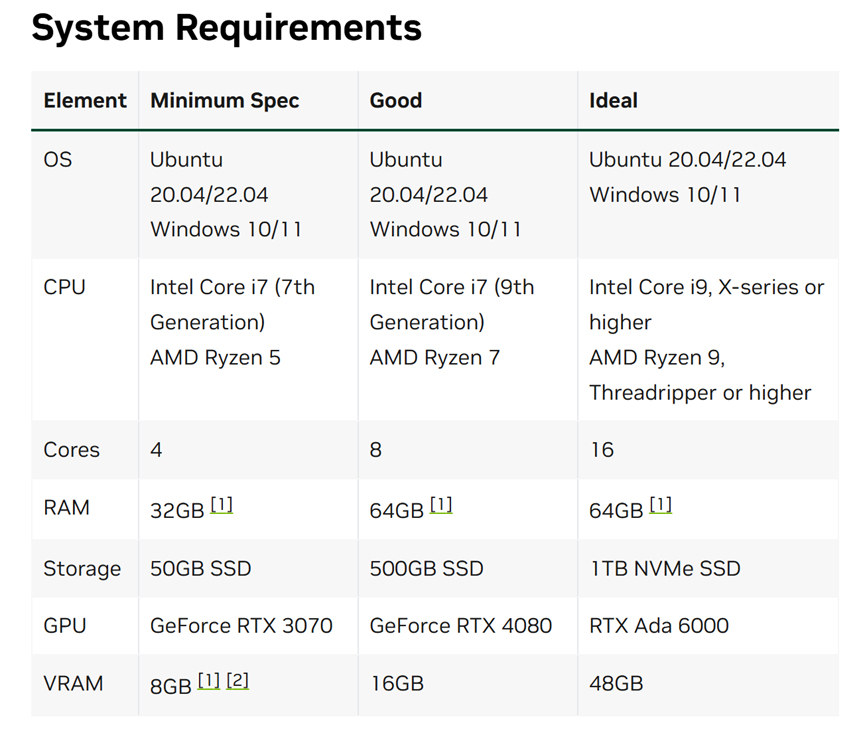
本文记录我在NVIDIA RTX 3090+Ubuntu 22.04环境下安装Isaac Sim 4.5的完整过程。安装过程中我踩了不少坑,包括ROS冲突、资产下载
🎉 Ubuntu 24.04 安装 ROS2 Jazzy(超详细图文教程 · 新手可直接成功) 🔥 本文适用:Ubuntu 24.04(Noble

环境: Ubuntu22.04 ROS2 3DGS和Fast_livo2的构建以及复现具体看前两篇文章 ubuntu22.04复现3DGS,包含双系统
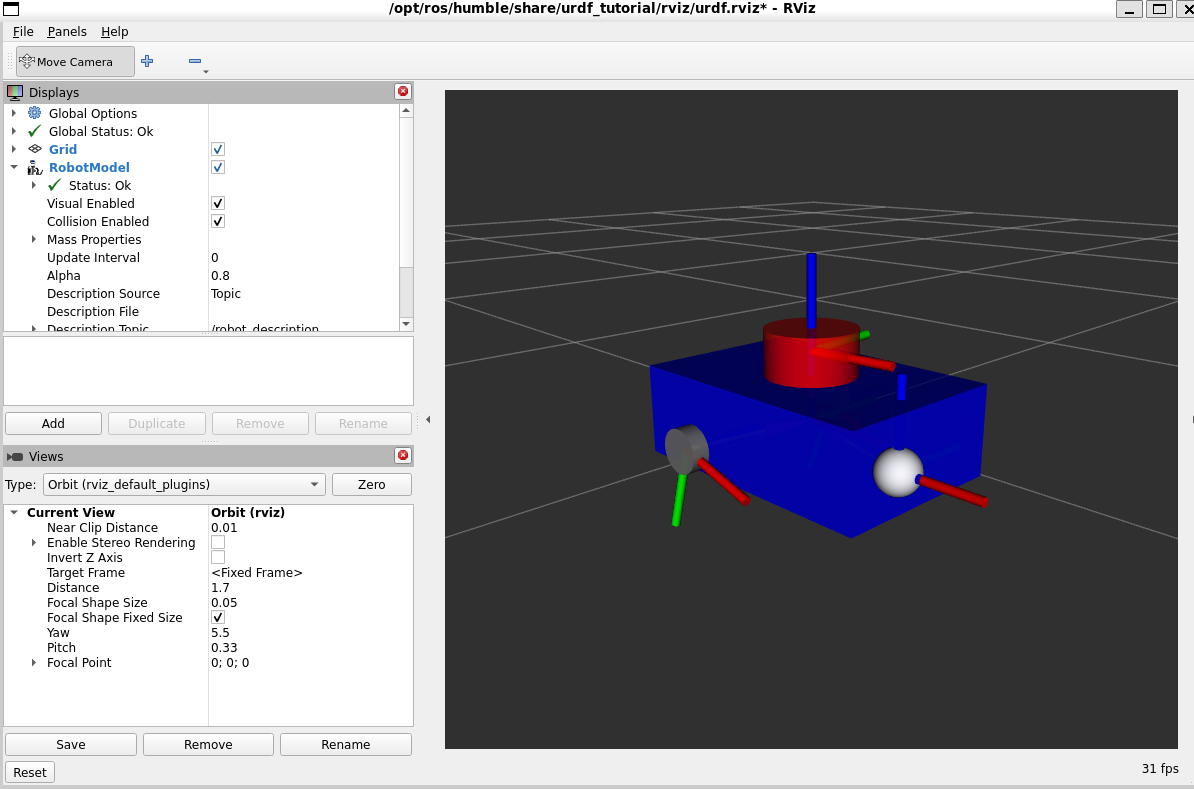
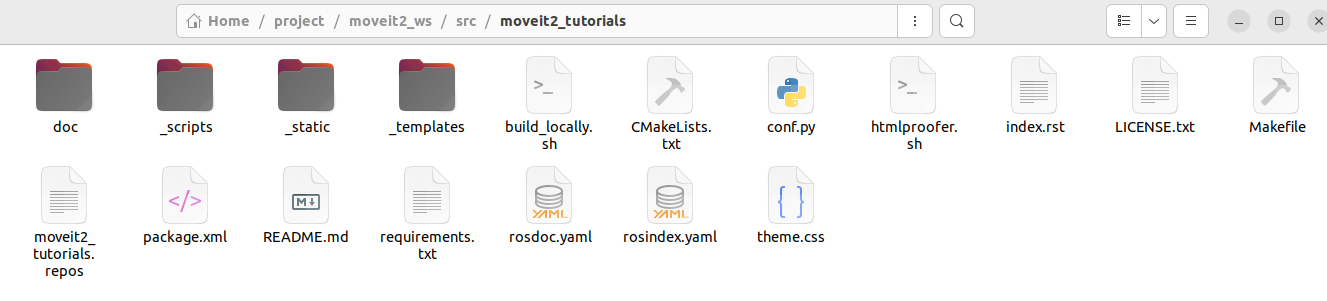
可以直接使用apt安装官方编译好的二进制包,也可以把源代码下载下来自己编译,本文是通过源码编译安装的Moveit2。 这里写

我在去年将览沃MID-360装配在ubuntu18.04+ros1,没什么麻烦事情,按照教程一步一步来就行。今年装配在ubuntu22.04+ros2就一地鸡
1. 安装RealSense SDK和ROS2驱动 1.1 安装依赖 sudo apt updatesudo apt install -y git cmake libssl-dev libusb-1.0-0-dev
