Gazebo多场景下的TurtleBot4键盘控制与真值轨迹记录
前言:
上一篇博客已经介绍了如何安装turtlebot4机器人包,运行机器人的ign gazebo仿真环境并加载turtlebot4机器人模型,接下来需要使用键盘控制机器人运动,在运动的过程中订阅tutlebot4机器人发布的/odom话题消息,保存为真值轨迹文件,并使用evo进行可视化(如果还未安装turtlebot4包,可以参考我上篇博客)
原理:
turtlrbot4的机器人的urdf文件里有一个差速控制插件diff,turtlrbot4机器人在仿真过程中通过该插件订阅/cmd_vel和发布/odom话题。而ros2的键盘控制节点能够发布/cmd_vel的话题,从而可以使用键盘控制机器人运动(当然也可以自己写一个节点发布cmd_vel话题)。发布的/odom话题数据,就是机器人的真实位姿
键盘控制:
输入以下指令启动机器人ign gazebo仿真
ros2 launch turtlebot4_ignition_bringup turtlebot4_ignition.launch.py待机器人完成初始化后,就可以使用键盘控制机器人运动了,输入指令:
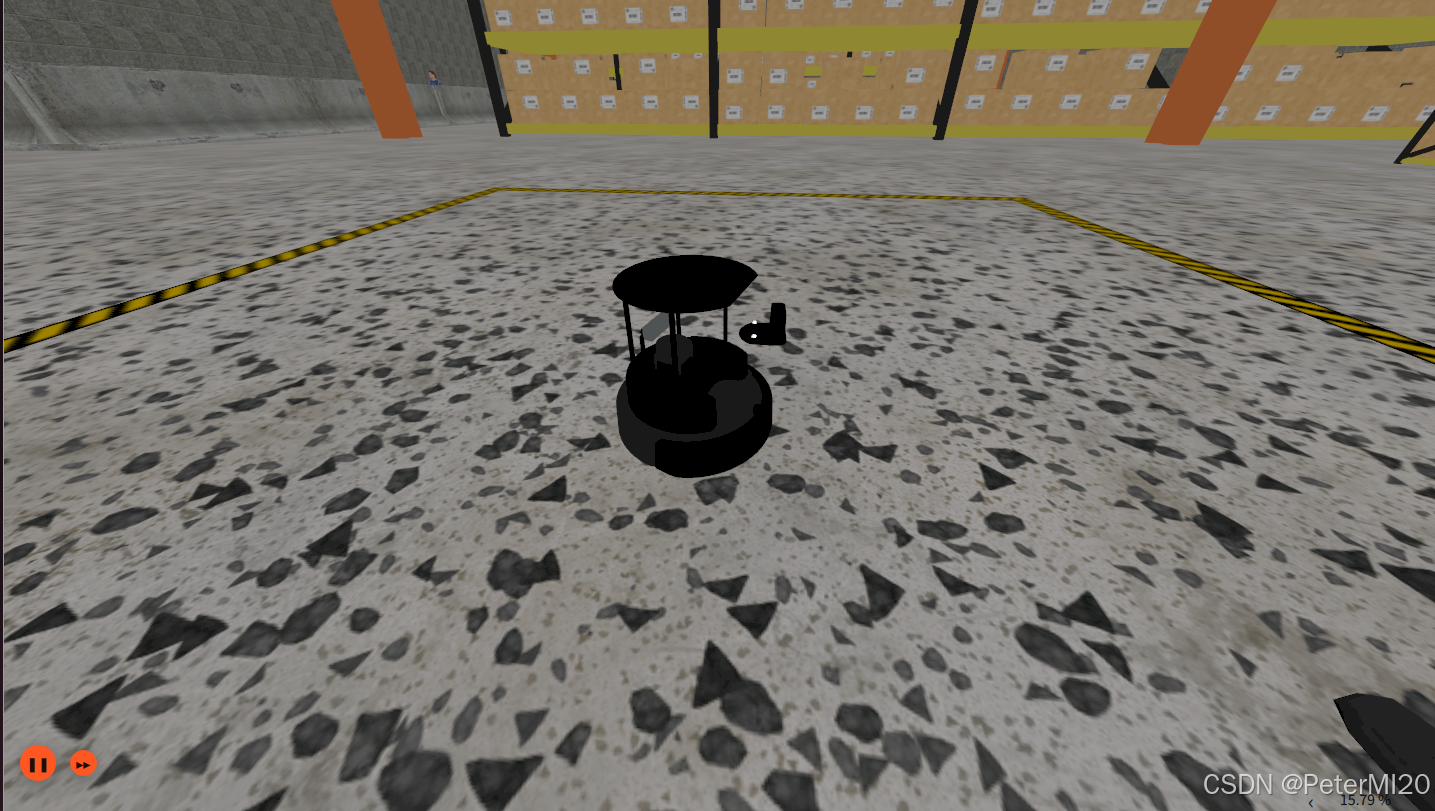
ros2 run teleop_twist_keyboard teleop_twist_keyboard 就可以控制机器人运动。控制机器人走一段路径,如下图所示:

保存轨迹:
odom数据格式
启动机器人仿真ign gazebo仿真后,机器人会发布/odom话题数据,我们先来看看/odom话题数据格式,输入以下指令:
ros2 topic listros2 topic echo /odom通过以上指令,我们可以看到/odom话题的数据消息格式,如下图所示:
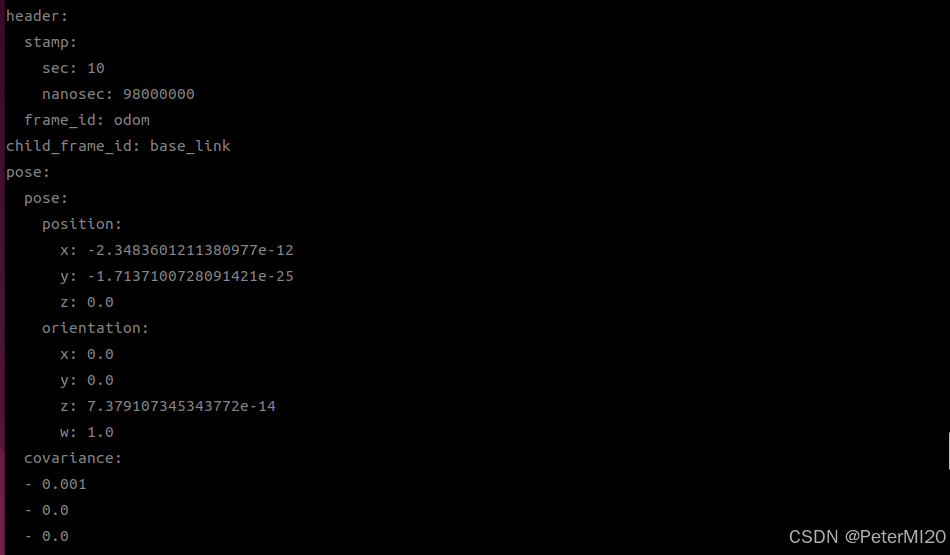
可以看到,话题数据是一个列表形式,我们只需要其中的position和orientation数据,即位置和姿态。
创建ros2节点
在turtlrbot4的工作空间turtlrbot4_ws/src中创建一个功能包,输入以下指令:
ros2 pkg create trajectory_save --build-type ament_python --dependencies rclpy创建功能包后,进入trajectory_save/trajectory_save文件路径下,创建node.py的文件,在这个文件中,我们编写代码实现订阅/odom话题数据,并保存为轨迹文件,代码如下:
import rclpy
from rclpy.node import Node
from nav_msgs.msg import Odometry
import sys
class OdomSubscriber(Node):
def __init__(self):
super().__init__('odom_subscriber')
self.subscription = self.create_subscription(
Odometry,
'/odom',
self.odom_callback,
10
)
self.file = open('trajectory_real_odom.tum', 'w')
def odom_callback(self, msg):
# 提取时间戳、位置和四元数
timestamp_sec = msg.header.stamp.sec
timestamp_nsec = msg.header.stamp.nanosec
timestamp = timestamp_sec + timestamp_nsec * 1e-9
position = msg.pose.pose.position
orientation = msg.pose.pose.orientation
# 写入 TUM 文件格式
line = f"{timestamp} {position.x} {position.y} {position.z} "
f"{orientation.x} {orientation.y} {orientation.z} {orientation.w}
"
self.file.write(line)
def main(args=None):
rclpy.init(args=args)
odom_subscriber = OdomSubscriber()
try:
rclpy.spin(odom_subscriber)
except KeyboardInterrupt:
pass
finally:
odom_subscriber.file.close()
odom_subscriber.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()同时在setup.py中修改配置,如图所示:
entry_points={
'console_scripts': [
"node = trajectory_save.node:main"
],
},进入turtlebot4_ws工作空间运行编译指令:
colcon build注意事项:
由于turtlrbot4的工作空间和该ros2节点的工作空间相同,我们可把/turtlrbot4_ws/install/setup.bash文件添加到~/.bashrc中,这样可以不用每次运行前在终端source环境变量。
运行以下指令打开~/.bashrc文件
vim ~/.bashrc添加环境如图所示:
# >>> fishros initialize >>>
source /opt/ros/humble/setup.bash
# <<< fishros initialize <<<
source /home/petermi/turtlebot4_ws/install/setup.bash #替换成你自己的路径
保存退出后,运行以下指令进行刷新
source ~/.bashrc打开任意一个终端,输入以下指令:
ros2 run trajectory_save node运行以上指令,就可以在该终端对应的文件路径下生成轨迹文件trajectory_real_odom.tum,如下图所示:
键盘控制运动同时保存轨迹文件
最终,我们只需要在ign gazebo环境中,同时启动键盘控制和录制轨迹,就可以得到机器人在运动过程中的真实轨迹文件
(1) 启动ign gazebo仿真环境
ros2 launch turtlebot4_ignition_bringup turtlebot4_ignition.launch.py(2) 启动键盘控制节点
ros2 run teleop_twist_keyboard teleop_twist_keyboard(3) 启动ros2节点
ros2 run trajectory_save node手动操作键盘控制机器人走一段路径后停止,如下图所示:
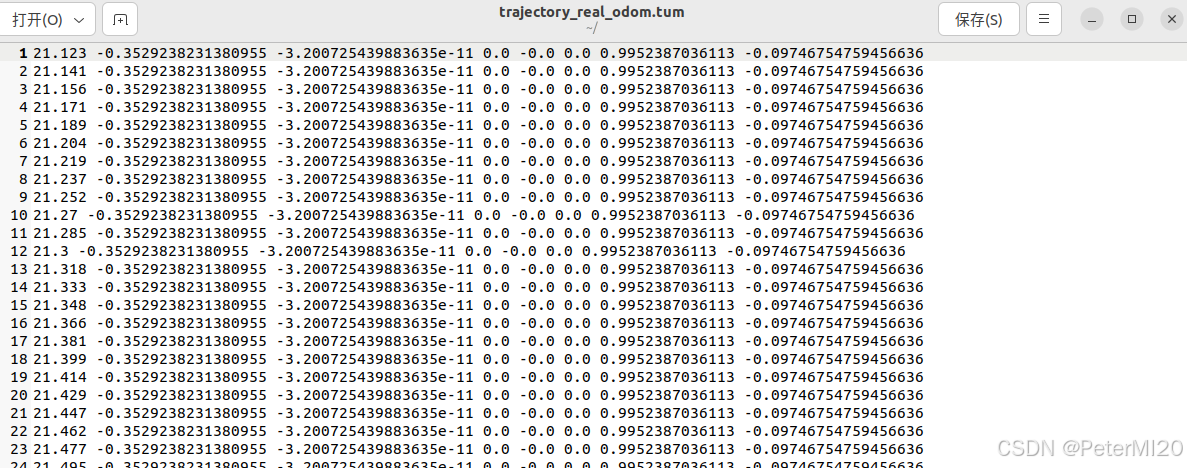
在与运行了ros2 run trajectory_save node指令的终端界面按ctrl+c结束录制,得到轨迹文件trajectory_real_odom.tum,并打开tum文件,如图所示:
evo画出轨迹
我这里已经提前下载好evo,如果想要下载,可以直接输入以下命令:
pip install evo --upgrade --no-binary evo -i https://pypi.tuna.tsinghua.edu.cn/simple
#用清华源加速pip安装
# 添加 ~/.local/bin 到 PATH
echo 'export PATH="$HOME/.local/bin:$PATH"' >> ~/.bashrc
source ~/.bashrc
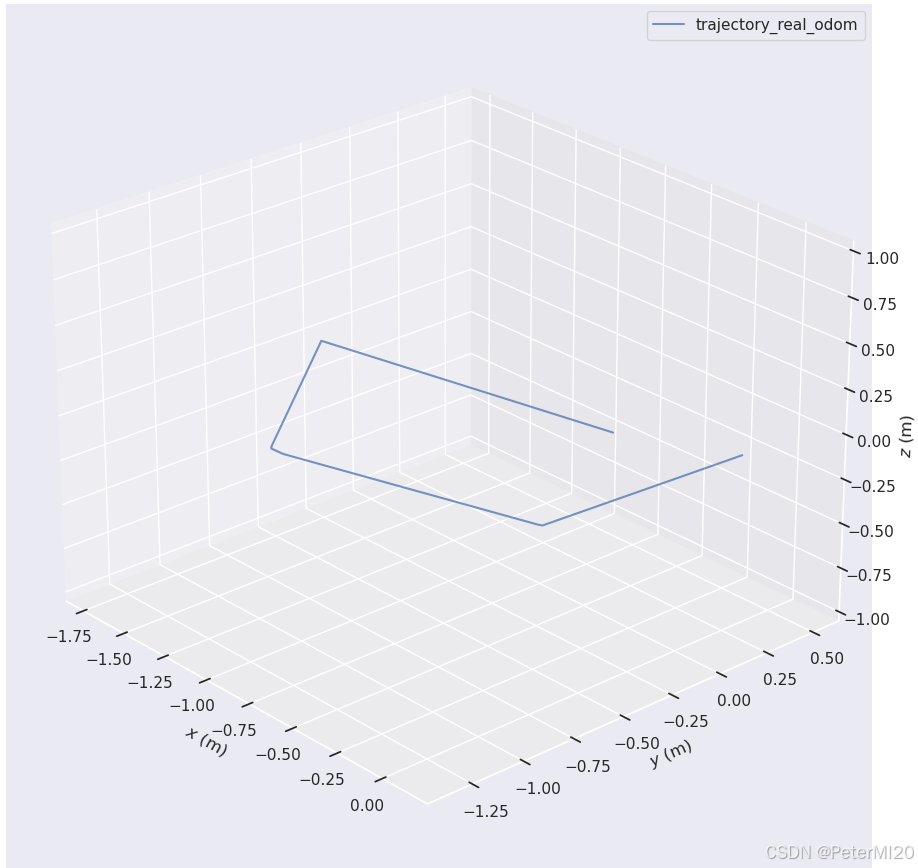
这里要注意的就是evo的版本。最后就可以使用evo画出机器人的真实轨迹,输入指令如下:
evo_traj tum trajectory_real_odom.tum -p
机器人的真实轨迹如图所示:
补充:/sim_ground_truth_pose话题数据也是机器人的真实位姿,ign gazebo仿真中该话题发布的位姿数据比/odom话题数据更加准确,大家有兴趣的可以试一试。本人最近在学习slam,如果有不对的地方,恳请指正,谢谢