【新手保姆级教程】 Ubuntu20.04安装ROS详细教程
【新手保姆级教程】 Ubuntu20.04安装ROS详细教程
本博客两种教程
1.省时间的小鱼一键安装,解决人生烦恼
2.官方安装
来看第一点,小鱼一键安装ROS
打开命令行输入;
wget http://fishros.com/install -O fishros && . fishros
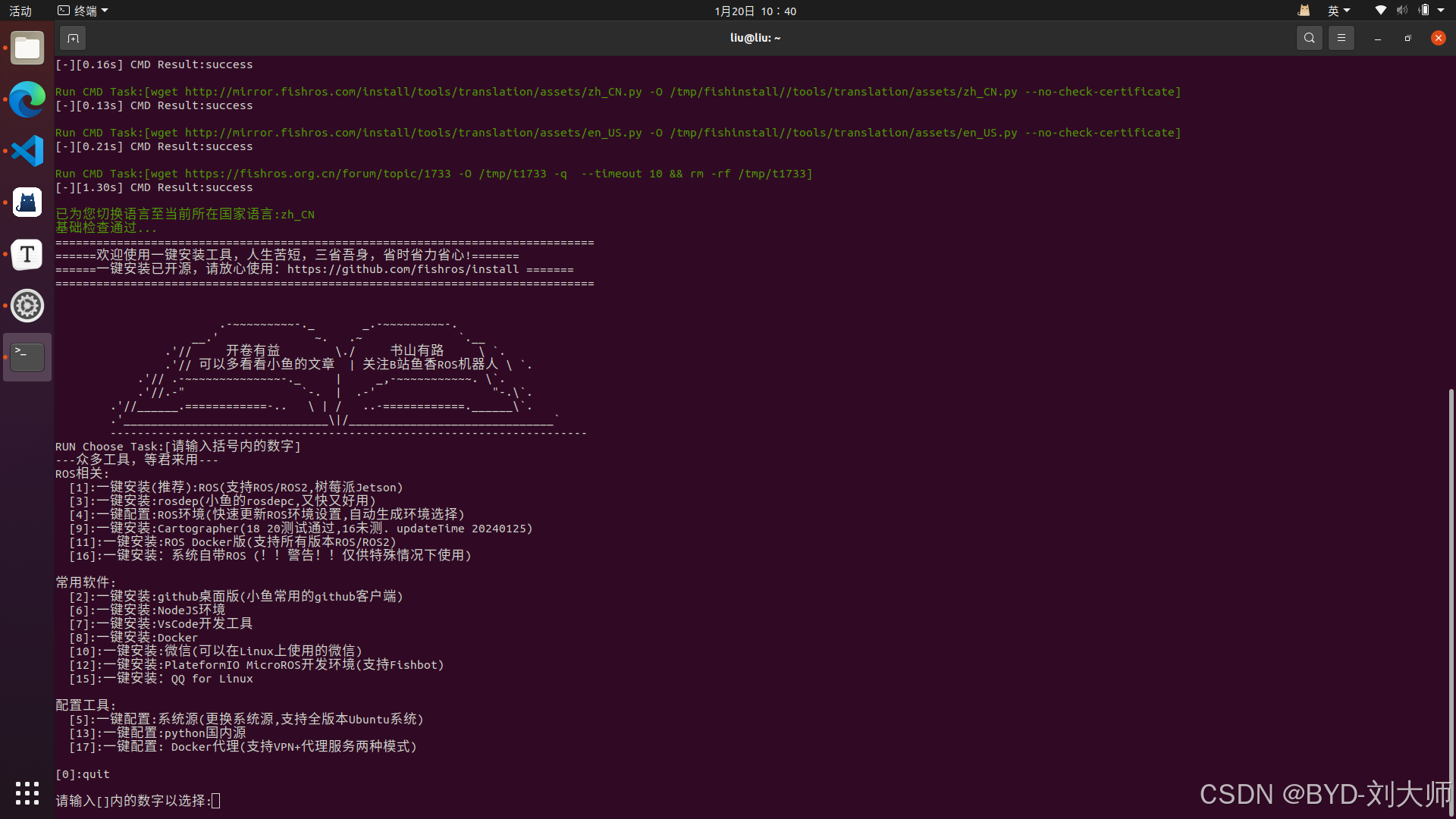
可以一键安装ROS,Cartographer,微信,MicroROS等等好用的工具。
第二点:官网安装ROS
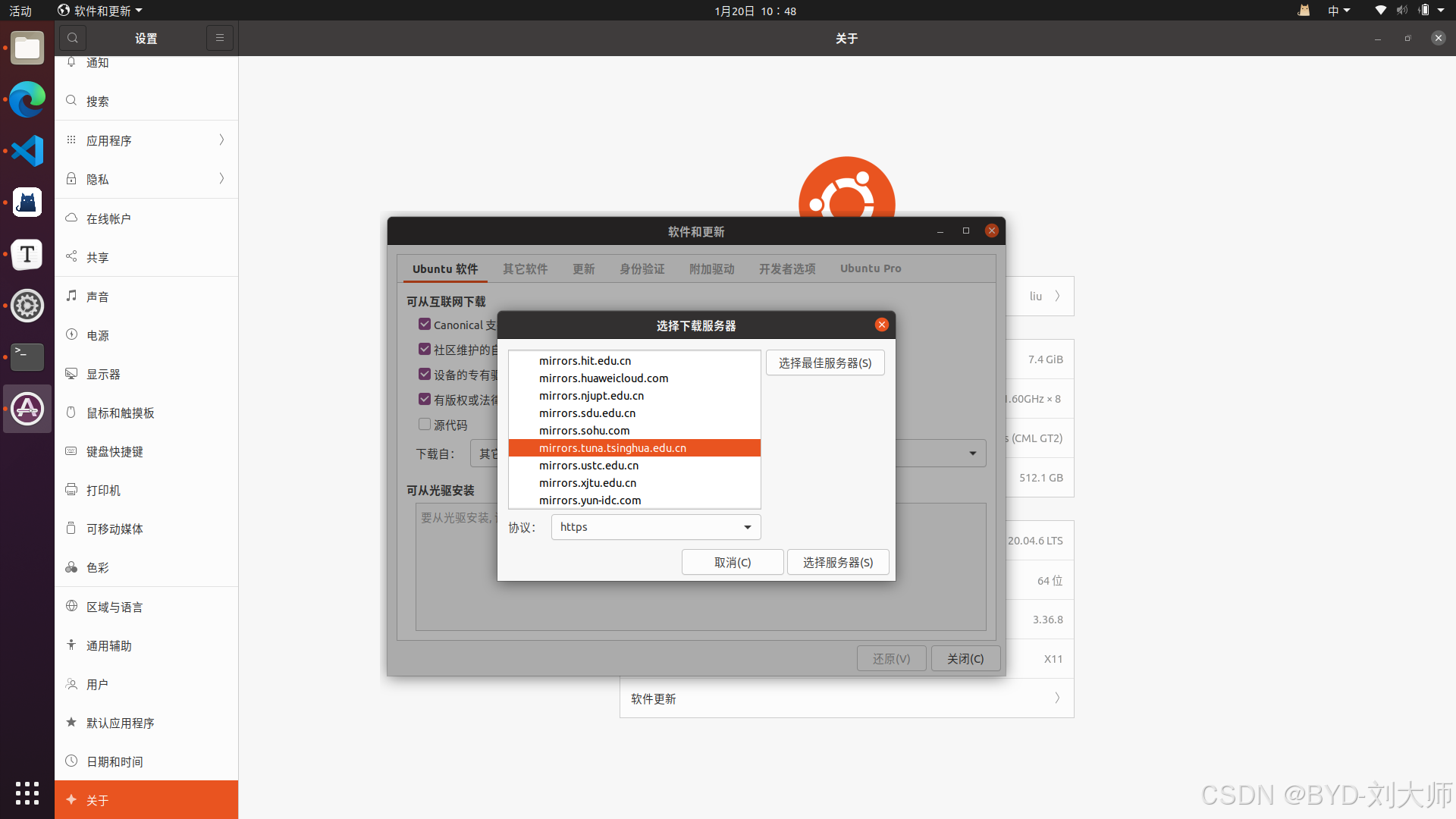
一.配置及更换最佳软件源(总软件源)
点击设置->关于->软件更新->下载自->选择清华源
二:添加ROS官方源:
1.添加ROS安装源:打开命令行,将命令复制到命令行
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
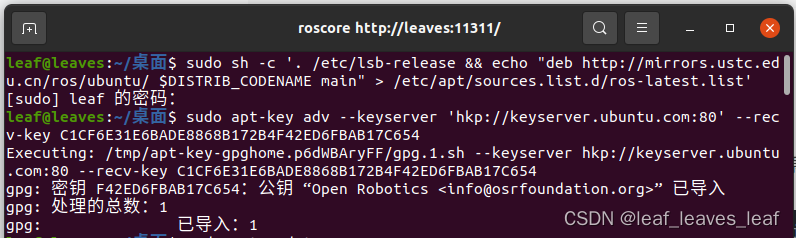
2.设置安装密钥:打开命令行,将命令复制到命令行
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
成功后会显示如下:
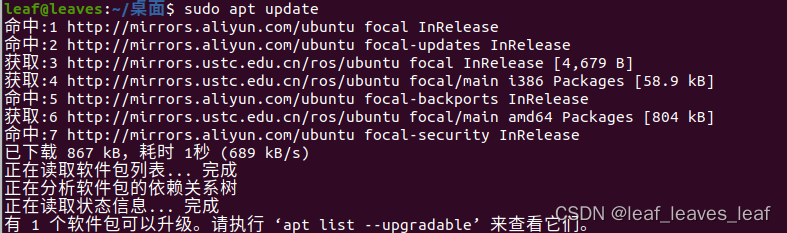
3.更新本机软件源头:
sudo apt update
成功显示如下:
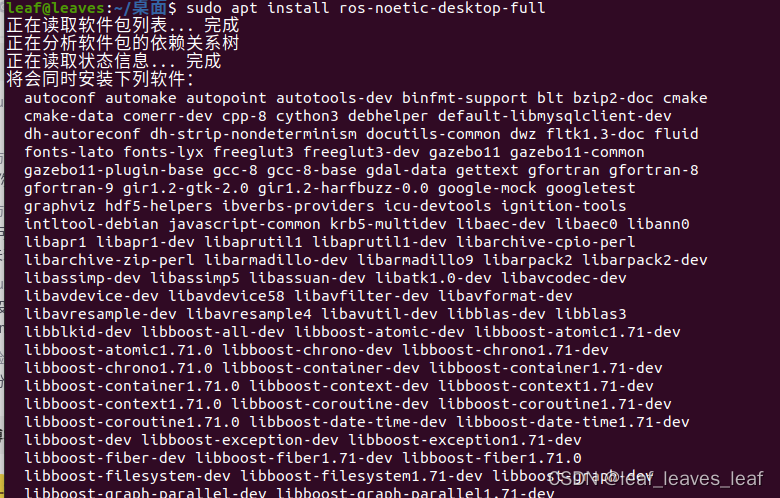
三.正式安装ROS:打开命令行,将命令复制到命令行
sudo apt install ros-noetic-desktop-full
成功显示如下
初始化rosdep
sudo rosdep init
成功显示如下

难点来了,因为网络问题,可能需要会出现的问题
1.ERROR:如果遇见rosdep找不到

输入以下指令:
sudo apt install python3-rosdep2
2.ERROR: default sources list file already exists: /etc/ros/rosdep/sources.list.d/20-default.list Please delete if you wish to re-initialize

输入以下指令解决问题:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
3.更新rosdep
rosdep update
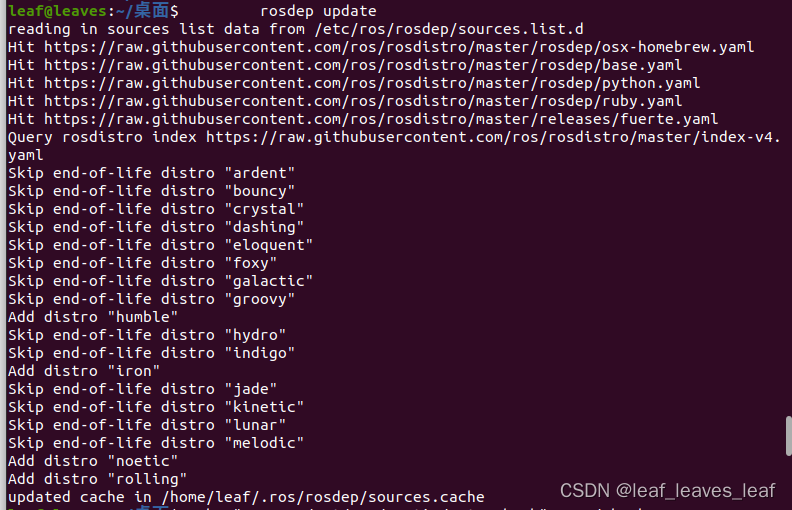
如果更新失败,需要科学上网:推荐链接进行注册,不会操作请私信!
https://h2breeze.com/register?aff=lGGvDcBn
4.配置环境变量
设置环境变量,方便在任意终端下使用 ros
输入以下命令配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
5.安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
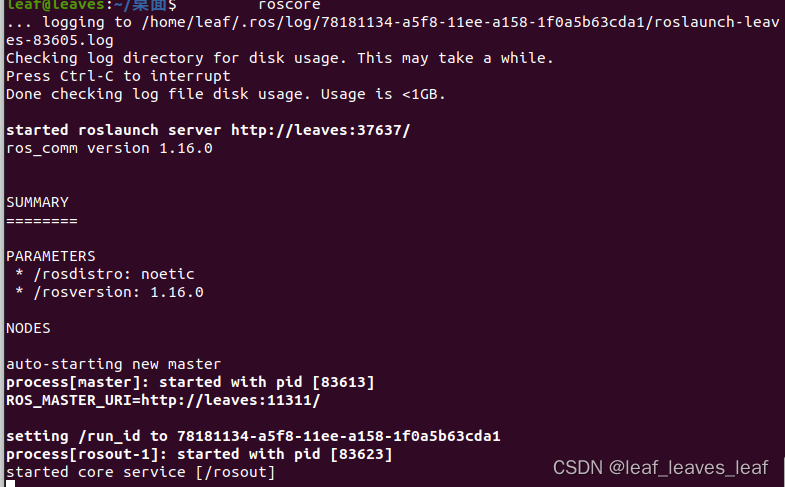
6. 用 roscore 命令验证 ROS 是否安装成功
roscore