【SLAM】在 ubuntu 18.04 arm 中以ROS环境编译与运行ORB_SLAM3
在ubuntu18.04arm中于ROS环境编译与运行ORB_SLAM3,并以TUM和EuRoC数据集测试了ROS下单目、双目和RGB-D运行。
1. 引言
在之前的博客中,已经介绍了基于虚拟机docker环境以及云端的AutoDL环境运行ORB_SLAM3的步骤。
在实际场景中,SLAM通常是需要在机器人平台上运行的,ROS就是一个比较常见的机器人开发平台,在ROS环境中运行,可以方便我们的SLAM系统与其他机器人功能模块(比如导航和路径规划)进行通信,而且在ros node模式下运行的SLAM更适合多机通讯环境,比如实现多机器人协同建图、机器人和PC交互等等功能。
ORB_SLAM3在本地运行的基础上,提供了在ROS中运行的机制,本文简述了如何在ubuntu 18.04 arm环境中安装ROS环境、编译ORB_SLAM3 ROS版本,以及用现有的数据集模拟摄像头信号输入来使用ORB_SLAM3的全流程。
本文示例环境:ubuntu 22.04 arm虚拟机下启动的ubuntu18.04 docker容器。
2. 安装ROS环境
参考【Linux】在ubuntu18.04arm中安装ROS环境一文进行安装,主要基于ROS官网的教程。
3. 编译ROS环境的ORB_SLAM3
本文撰写时UZ-SLAMLab/ORB_SLAM3的最新提交为2022年2月10日的4452a3c4ab75b1cde34e5505a36ec3f9edcdc4c4,后文的教程基于此提交点。

3.1. 编译命令
3.1.1. 先编译普通版本
本文不赘述安装ORB_SLAM3依赖项的步骤,您可以参考【SLAM】于ubuntu18.04上纯CPU运行GCNv2_SLAM的记录(ARM64/AMD64) | 慕雪的寒舍 一文中的依赖项安装步骤。参考博客里面的步骤安装opencv、eigen3、Pangolin6.0就可以了,不需要安装libtorch。
其中需要注意的是,如果你需要编译ROS的ORB_SLAM3,opencv不能安装3.4.5版本,必须安装3.2.0版本!好消息是,如果你是跟随者本站或者ROS官网的教程安装的ROS,那么opencv 3.2.0版本已经和ROS一起安装在你的系统里面了。
安装完毕依赖后,先以普通模式编译ORB_SLAM3,因为ROS版本依赖于普通版本才能进行编译,这一点必须要注意。
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git ORB_SLAM3
cd ORB_SLAM3
chmod +x build.sh
./build.sh
3.1.2. 修改build_ros.sh脚本
编译完毕普通版本后,才可以执行build_ros.sh脚本。但是先别急,cat这个脚本,看看里面写了啥
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3# cat build_ros.sh
echo "Building ROS nodes"
cd Examples/ROS/ORB_SLAM3
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make -j
其中第一个命令就有问题了,最新版本的ORB_SLAM3源码里面,Examples路径下已经没有ROS目录了,这个目录现在是Examples_old/ROS/ORB_SLAM3。

如果你没有注意这个问题就开始执行build_ros.sh脚本,问题就会出现,因为Examples/ROS/ORB_SLAM3目录当前不存在,该脚本实际上是直接在项目根目录下创建了build目录然后cmake开始编译的,编译的完全不是ROS版本。
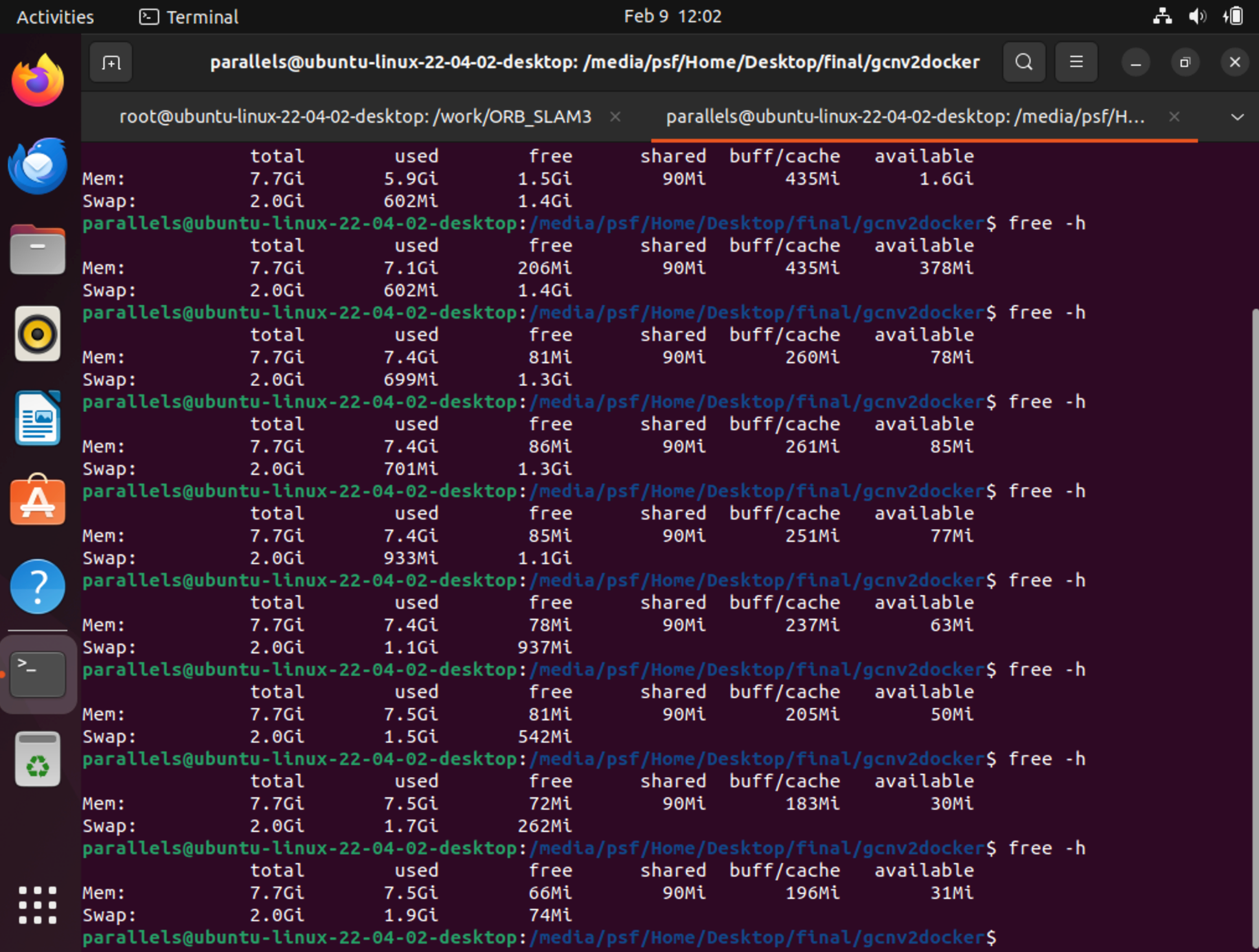
这个脚本里面还有另外一个坑,那就是make -j后面没有写任何数字。这会导致make无休止地使用系统资源,直到把你的整个系统内存和swap都吃光光。根据我找到的博客,ORB_SLAM3的编译最多能吃掉16GB内存,完全是个洪水猛兽。
最开始我没有注意这个脚本,以为它没有任何问题,就直接执行了,最终在编译时遇到了如下错误。
c++: internal compiler error: Killed (program cc1plus)
Please submit a full bug report,
with preprocessed source if appropriate.
See for instructions.
这个错误就是因为系统没有资源了。开另外一个终端,再启动编译,你可以轻易地观察到编译是怎么把整个系统内存给吃光光的,最终物理内存和swap都没了,操作系统自然会kill掉编译进程,从而导致了上述报错。
如果你直接搜索“ORB_SLAM3编译失败”等字样,可能会搜到相关教程让你加大swap文件,这是一个可选项,但还不够可选,因为在我的测试中,即便再给出2GB的swap文件,编译依旧会因为内存不足而失败。下面给出新增swap文件的命令。
# 安装
apt install util-linux
# 分配2G
sudo fallocate -l 2G /swapfile
# 给予权限
sudo chmod 600 /swapfile
# 激活权限(执行了之后swap就生效了)
sudo mkswap /swapfile
sudo swapon /swapfile
# 不需要的时候,使用如下命令删除swap文件
swapoff -v /swapfile
rm /swapfile
实际上,在物理内存大于8GB的环境中不需要这么麻烦,前文提到了脚本里面make没有写线程数,解决办法就是修正这个脚本,首先是修正目录,其次是将make后面加上-j4来限制make使用的资源,这样就能绕过内存不足导致的编译错误了。修改后的脚本如下:
echo "Building ROS nodes"
cd Examples_old/ROS/ORB_SLAM3
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make -j4
如果你的环境物理内存低于8GB,可以考虑在加大swap文件的同时进一步减少make使用的线程数,比如make -j2。
3.1.3. 编译ROS版本
修正了build_ros.sh脚本之后,就可以开始编译ROS版本了。
chmod +x build_ros.sh
./build_ros.sh
再次提醒,ROS版本的编译依赖于普通版本,需要先编译普通版本!
3.2. 编译期间遇到的各种问题
部分问题参考:记录配置ubuntu18.04下运行ORBSLAM3的ros接口的过程及执行单目imu模式遇到的问题
3.2.1. cmake错误ROS_PACKAGE_PATH
遇到的第一个错误应该是环境变量有关,编译ros版本的时候,需要将源码路径加入到环境变量中,才可以正常编译。
CMake Error at /opt/ros/melodic/share/ros/core/rosbuild/private.cmake:99 (message):
[rosbuild] rospack found package "ORB_SLAM3" at "", but the current
directory is "/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3". You should
double-check your ROS_PACKAGE_PATH to ensure that packages are found in the
correct precedence order.
Call Stack (most recent call first):
/opt/ros/melodic/share/ros/core/rosbuild/public.cmake:177 (_rosbuild_check_package_location)
CMakeLists.txt:4 (rosbuild_init)
在ORB_SLAM3项目根目录下执行如下命令即可
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$PWD/Examples_old/ROS/ORB_SLAM3
修正之后即可正常开始编译
3.2.2. 头文件se3.hpp找不到
编译到30%的时候,会提示
[ 30%] Building CXX object CMakeFiles/Mono_Inertial.dir/src/ros_mono_inertial.cc.o
In file included from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/Frame.h:30:0,
from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/KeyFrame.h:28,
from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/MapPoint.h:23,
from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/FrameDrawer.h:24,
from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/Viewer.h:23,
from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/Tracking.h:26,
from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/System.h:31,
from /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/ros_mono_inertial.cc:34:
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/../../../include/ImuTypes.h:29:10: fatal error: sophus/se3.hpp: No such file or directory
#include
^~~~~~~~~~~~~~~~****
这个第三方库sophus已经在Thirdparty文件夹里面自带了,刚刚我们编译普通版本的时候,其实也已经编译好了这个第三方库了。要做的就是进它的目录make install安装一下。
cd Thirdparty/Sophus/build/
make install
安装以后就解决这个问题了。
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3# cd Thirdparty/Sophus/build/
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3/Thirdparty/Sophus/build# make install
[ 8%] Built target test_sim2
[ 16%] Built target test_se2
[ 25%] Built target test_so3
[ 33%] Built target test_rxso2
[ 41%] Built target test_so2
[ 50%] Built target test_se3
[ 58%] Built target test_geometry
[ 66%] Built target test_rxso3
[ 75%] Built target test_sim3
[ 83%] Built target test_velocities
[ 91%] Built target test_common
[100%] Built target HelloSO3
Install the project...
-- Install configuration: "Release"
-- Installing: /usr/local/share/sophus/cmake/SophusTargets.cmake
-- Installing: /usr/local/share/sophus/cmake/SophusConfig.cmake
-- Installing: /usr/local/share/sophus/cmake/SophusConfigVersion.cmake
-- Installing: /usr/local/include/sophus/average.hpp
-- Installing: /usr/local/include/sophus/common.hpp
-- Installing: /usr/local/include/sophus/geometry.hpp
-- Installing: /usr/local/include/sophus/interpolate.hpp
-- Installing: /usr/local/include/sophus/interpolate_details.hpp
-- Installing: /usr/local/include/sophus/num_diff.hpp
-- Installing: /usr/local/include/sophus/rotation_matrix.hpp
-- Installing: /usr/local/include/sophus/rxso2.hpp
-- Installing: /usr/local/include/sophus/rxso3.hpp
-- Installing: /usr/local/include/sophus/se2.hpp
-- Installing: /usr/local/include/sophus/se3.hpp
-- Installing: /usr/local/include/sophus/sim2.hpp
-- Installing: /usr/local/include/sophus/sim3.hpp
-- Installing: /usr/local/include/sophus/sim_details.hpp
-- Installing: /usr/local/include/sophus/so2.hpp
-- Installing: /usr/local/include/sophus/so3.hpp
-- Installing: /usr/local/include/sophus/types.hpp
-- Installing: /usr/local/include/sophus/velocities.hpp
-- Installing: /usr/local/include/sophus/formatstring.hpp
3.2.3. OpenCV 版本不匹配
前文提到过,OpenCV必须安装 3.2.0 版本,是因为cv_bridge默认会指向ROS自带的3.2.0版本,而不是我们自己安装的其他版本,最终编译或者运行的时候就会导致链接错误或者coredump错误。
/usr/bin/ld: warning: libopencv_core.so.3.2, needed by /opt/ros/melodic/lib/libcv_bridge.so, may conflict with libopencv_core.so.3.4
如果你已经安装了其他版本的opencv,需要删掉它们。从源码安装的话,直接进入opencv源码的build目录执行make uninstall就可以卸载掉自己安装的opencv。
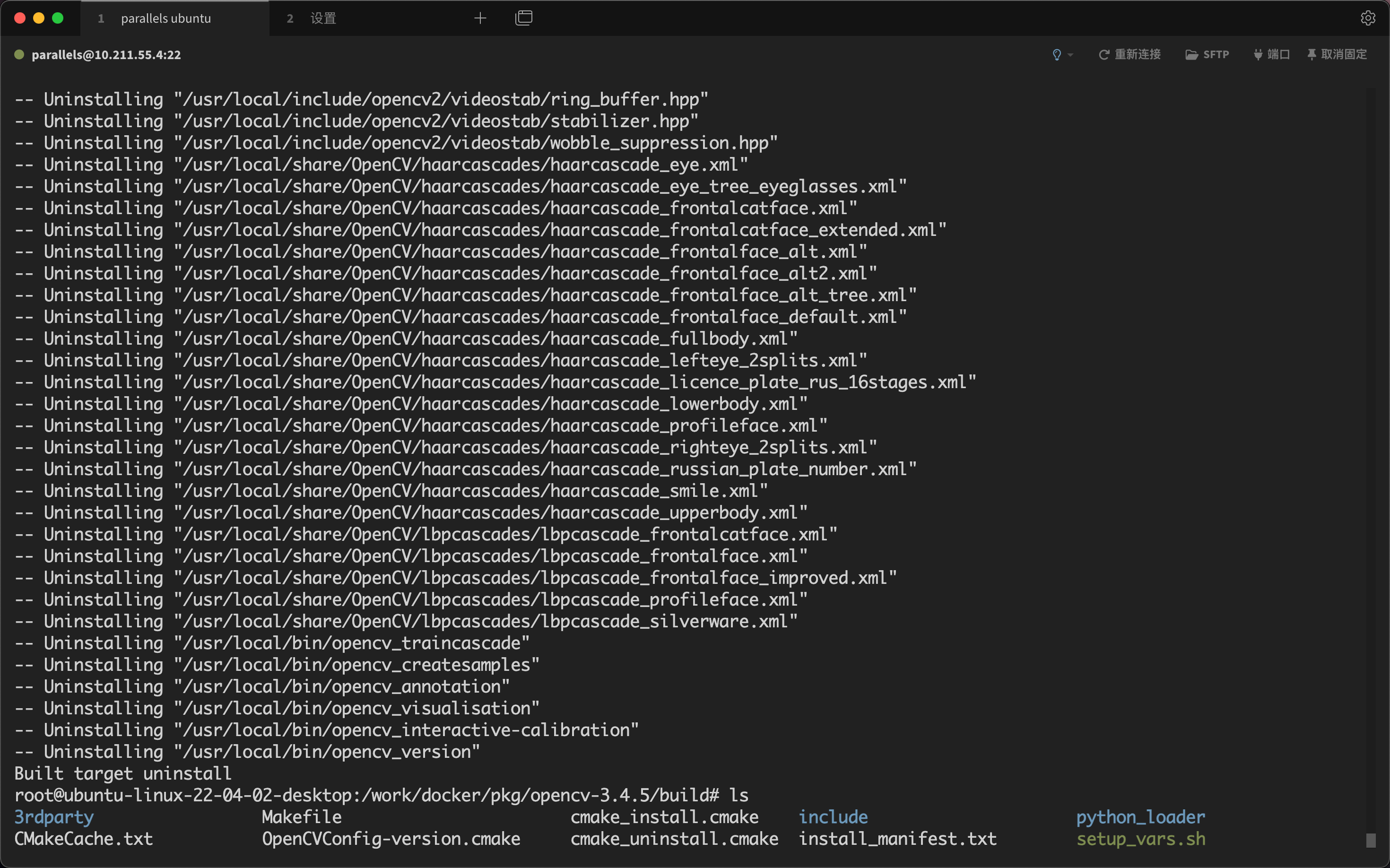
删掉了之后就会发现系统里面只剩下和ros一起安装的3.2.0版本opencv了,应该是下载ros环境的时候自动安装的。
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3# pkg-config --modversion opencv
3.2.0
随后我们需要修改CMakeLists文件,让编译的时候使用opencv 3.2.0版本。首先是根目录下的CMakeLists,修改如下部分的版本号为3.2即可
# ORB_SLAM3/CMakeLists.txt
find_package(OpenCV 3.2)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 3.2 not found.")
endif()
然后是Examples_old/ROS/ORB_SLAM3里面的CMakeLists文件,修改如下部分为3.2.0版本
# ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/CMakeLists.txt
find_package(OpenCV 3.2.0 QUIET) # 修改为3.2.0
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 2.4.3 not found.")
endif()
endif()
接下来就要删除所有编译缓存,重新编译一遍。
rm -rf Thirdparty/g2o/build/
rm -rf Thirdparty/DBoW2/build/
rm -rf Thirdparty/Sophus/build/
rm -rf Vocabulary/*.bin
rm -rf ./build
rm -rf Examples_old/ROS/ORB_SLAM3/build
注意普通版本也需要重新编译!因为最开始编译的时候我的普通版本是基于opecv 3.4.5编译的,如果不重新基于opencv 3.2.0编译普通版本,编译ROS的时候就会提示libORB_SLAM3.so需要3.4.5版本的opencv才能正常链接,终究还是版本对不上。
3.2.4. AR代码错误(四处)
修复了opencv版本问题后,接下来就会遇到一堆由于Examples_old/ROS/ORB_SLAM3/src/AR路径下的代码问题导致的错误。如果你不需要使用MonoAR也就是单目AR功能,可以直接注释掉CMakeLists文件里面71行的如下部分,跳过AR代码的编译。
# ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/CMakeLists.txt
# Node for monocular camera (Augmented Reality Demo)
rosbuild_add_executable(MonoAR
src/AR/ros_mono_ar.cc
src/AR/ViewerAR.h
src/AR/ViewerAR.cc
)
target_link_libraries(MonoAR
${LIBS}
)
注释掉之后,应该就可以成功编译其他部分了
[rosbuild] Including /opt/ros/melodic/share/roslisp/rosbuild/roslisp.cmake
[rosbuild] Including /opt/ros/melodic/share/roscpp/rosbuild/roscpp.cmake
[rosbuild] Including /opt/ros/melodic/share/rospy/rosbuild/rospy.cmake
Build type: Release
-- Using flag -std=c++11.
-- Configuring done
-- Generating done
-- Build files have been written to: /work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/build
[ 0%] Built target rospack_genmsg_libexe
[ 0%] Built target rosbuild_precompile
[ 40%] Built target RGBD
[ 40%] Built target Stereo
[ 80%] Built target Mono_Inertial
[ 80%] Built target Stereo_Inertial
[100%] Built target Mono
如果你需要MonoAR,就需要上手改代码了。参考github.com/UZ-SLAMLab/ORB_SLAM3/issues/442,依次修复问题。
这部分修改很杂,你可以直接根据我的提交记录来修改:Fix compile error of ROS AR, used opencv 3.2.0 for ROS compile. · musnows/ORB_SLAM3@4e1cbdb · GitHub
1)类型Sophus::SE3和cv::Mat不匹配
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ros_mono_ar.cc: In member function 'void ImageGrabber::GrabImage(const ImageConstPtr&)':
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ros_mono_ar.cc:151:41: error: conversion from 'Sophus::SE3f {aka Sophus::SE3}' to non-scalar type 'cv::Mat' requested
cv::Mat Tcw = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec());
~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
CMakeFiles/MonoAR.dir/build.make:198: recipe for target 'CMakeFiles/MonoAR.dir/src/AR/ViewerAR.cc.o' failed
修改ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ros_mono_ar.cc的151行,被注释掉的是源代码
// cv::Mat Tcw = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec());
cv::Mat Tcw;
Sophus::SE3f Tcw_SE3f = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec());
Eigen::Matrix4f Tcw_Matrix = Tcw_SE3f.matrix();
cv::eigen2cv(Tcw_Matrix, Tcw);
2)'eigen2cv' is not a member of 'cv' 错误
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ros_mono_ar.cc:155:9: error: 'eigen2cv' is not a member of 'cv'
cv::eigen2cv(Tcw_Matrix, Tcw);
^~~~~~~~
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ros_mono_ar.cc:155:9: note: suggested alternative: 'eigen'
cv::eigen2cv(Tcw_Matrix, Tcw);
^~~~~~~~
eigen
在ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ros_mono_ar.cc和ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.h顶部添加三个头文件
#include 3)类型Eigen::Matrix和cv::Mat不匹配
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc: In member function 'void ORB_SLAM3::Plane::Recompute()':
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc:530:42: error: conversion from 'Eigen::Vector3f {aka Eigen::Matrix}' to non-scalar type 'cv::Mat' requested
cv::Mat Xw = pMP->GetWorldPos();
~~~~~~~~~~~~~~~~^~
修改ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc:530处代码
// cv::Mat Xw = pMP->GetWorldPos();
cv::Mat Xw;
cv::eigen2cv(pMP->GetWorldPos(), Xw);
4)尾插错误 no matching function for call to 'std::vector
这个问题也是类型不匹配
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc: In member function 'ORB_SLAM3::Plane* ORB_SLAM3::ViewerAR::DetectPlane(cv::Mat, const std::vector&, int)':
/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc:405:53: error: no matching function for call to 'std::vector::push_back(Eigen::Vector3f)'
vPoints.push_back(pMP->GetWorldPos());
^
修改ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.cc:405的代码
// vPoints.push_back(pMP->GetWorldPos());
cv::Mat WorldPos;
cv::eigen2cv(pMP->GetWorldPos(), WorldPos);
vPoints.push_back(WorldPos);
3.3. 成功编译
修改完毕上述四个问题后,就应该可以编译成功了。

编译完成后会多出很多可执行文件。
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3# ls
Asus.yaml CMakeLists.txt Mono MonoAR Mono_Inertial RGBD Stereo Stereo_Inertial build lib manifest.xml src
注意这些可执行文件是不能直接运行的,因为它们是针对ROS设计的文件。
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3# ./Mono
[ERROR] [1739083807.698375008]: [registerPublisher] Failed to contact master at [localhost:11311]. Retrying...
^C
Usage: rosrun ORB_SLAM3 Mono path_to_vocabulary path_to_settings
4. 在ROS下运行项目
参考博客:ORB-SLAM3的CMake与ROS编译以及测试;ORB SLAM 2 demo 复现(普通模式 + ROS 模式) - 简书;
4.1. 下载TUM和EuRoC数据集
因为是在ROS环境下运行,所以数据集不能用之前下载的tgz格式的了,必须使用ROS专门的bag格式的数据集。
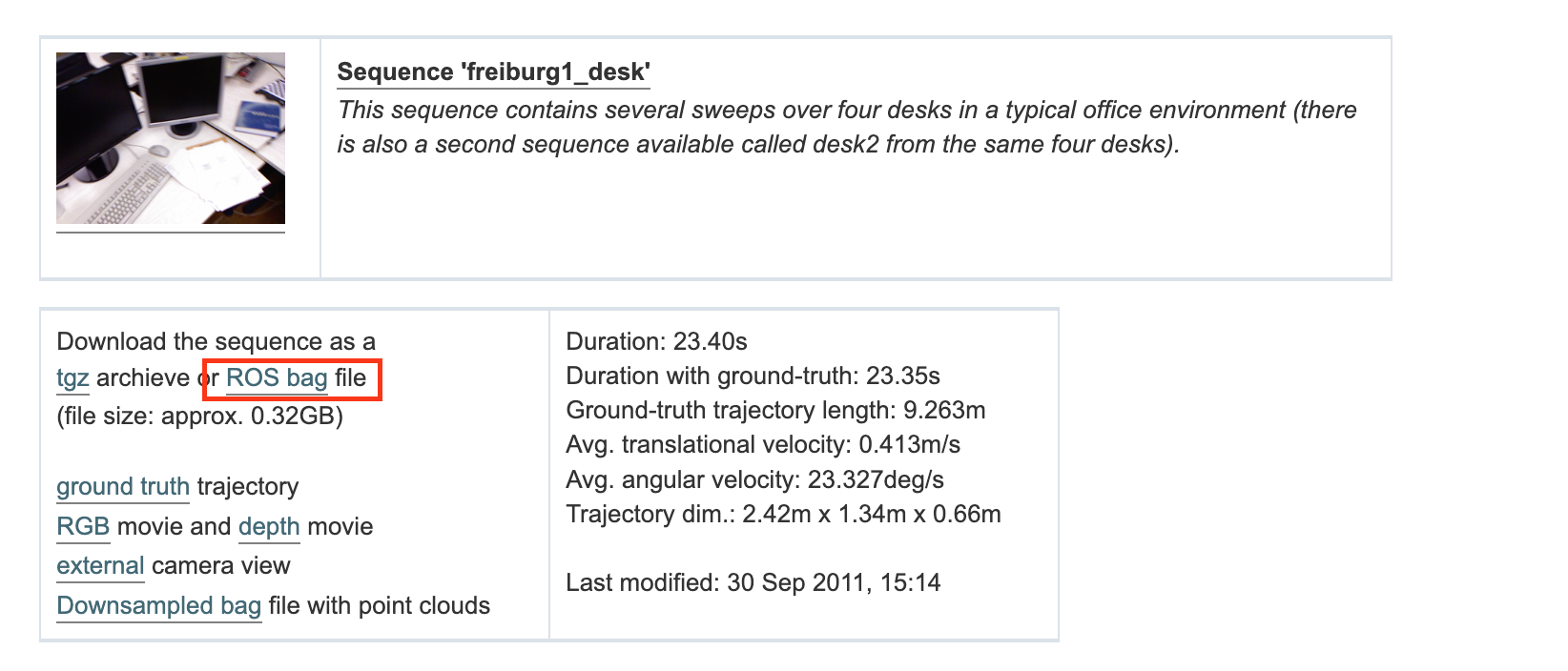
- TUM RGB-D数据集:cvg.cit.tum.de/data/datasets/rgbd-dataset/download;
- EuRoC双目数据集:robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_ha…
在TUM数据集的下载页面中,往下滑可以看到每个数据集的简单介绍,这里就能下载到bag格式的数据集。
下载完毕后,可以使用rosbag info命令查看数据集中有的topic信息:
- Topic是一个命名的通信管道,用于在不同的ROS节点之间传递信息;
- 每个Topic都有一个唯一的名称,节点可以通过这个名称来订阅这个topic的信息;
- Topic中的数据以message的格式传输,message是ROS中定义好的数据结构,如
sensor_msgs/Image、geometry_msgs/Pose等;
举个例子,fr1/desk数据集的Topic信息如下,其中depth就是深度数据,rgb就是普通的彩色录像数据。
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3# rosbag info datasets/TUM/rgbd_dataset_freiburg1_desk.bag
path: datasets/TUM/rgbd_dataset_freiburg1_desk.bag
version: 2.0
duration: 23.8s
start: May 10 2011 20:44:09.56 (1305031449.56)
end: May 10 2011 20:44:33.32 (1305031473.32)
size: 371.7 MB
messages: 19893
compression: bz2 [1210/1210 chunks; 29.85%]
uncompressed: 1.2 GB @ 52.3 MB/s
compressed: 370.9 MB @ 15.6 MB/s (29.85%)
types: sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
tf/tfMessage [94810edda583a504dfda3829e70d7eec]
visualization_msgs/MarkerArray [f10fe193d6fac1bf68fad5d31da421a7]
topics: /camera/depth/camera_info 595 msgs : sensor_msgs/CameraInfo
/camera/depth/image 595 msgs : sensor_msgs/Image
/camera/rgb/camera_info 613 msgs : sensor_msgs/CameraInfo
/camera/rgb/image_color 613 msgs : sensor_msgs/Image
/cortex_marker_array 2360 msgs : visualization_msgs/MarkerArray
/imu 11815 msgs : sensor_msgs/Imu
/tf 3302 msgs : tf/tfMessage
而给出的EuRoC双目数据集的Topic如下,有两个cam就对应了左侧和右侧的两个相机。
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3/datasets# rosbag info MH_01_easy.bag
path: MH_01_easy.bag
version: 2.0
duration: 3:06s (186s)
start: Jun 25 2014 03:02:59.81 (1403636579.81)
end: Jun 25 2014 03:06:06.70 (1403636766.70)
size: 2.5 GB
messages: 47283
compression: none [2456/2456 chunks]
types: geometry_msgs/PointStamped [c63aecb41bfdfd6b7e1fac37c7cbe7bf]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
topics: /cam0/image_raw 3682 msgs : sensor_msgs/Image
/cam1/image_raw 3682 msgs : sensor_msgs/Image
/imu0 36820 msgs : sensor_msgs/Imu
/leica/position 3099 msgs : geometry_msgs/PointStamped
假设我们使用自己的摄像头的话,也是利用ROS的工具将我们摄像头的数据输入到一个Topic中,这样就可以供系统的其他组件,比如SLAM系统来读取,以此实现在ROS系统上硬件输入和软件的读取。这便是使用ROS模式和普通模式的最大区别,普通模式下我们必须要直接提供程序的数据输入源,才能让程序运行起来;而ROS模式下我们可以先把整个SLAM系统启动起来,再通过我们想要的方式往SLAM系统订阅的Topic里面喂数据即可。
4.2. 单目运行
刚刚我们下载的TUM fr1/desk的数据集,即可以用作RGB-D模式的输入,又可以做单目摄像头的输入,因为深度数据是独立于RGB单目数据的。
刚刚我们直接运行Mono的时候,就打印出了一个Usage
root@ubuntu-linux-22-04-02-desktop:/work/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3# ./Mono
[ERROR] [1739083807.698375008]: [registerPublisher] Failed to contact master at [localhost:11311]. Retrying...
^C
Usage: rosrun ORB_SLAM3 Mono path_to_vocabulary path_to_settings
我们要使用的就是这个命令,rosrun代表启动一个节点,ORB_SLAM3是我们当前使用的包名称,也就是CMakeLists里面注册的项目名称,Mono是我们要执行的可执行文件名称。后面的两个参数分别是词袋文件和相机的配置文件。
最终执行的命令如下,需要在两个终端中执行(在项目根目录执行)
# 打开终端A
roscore
# 打开终端B
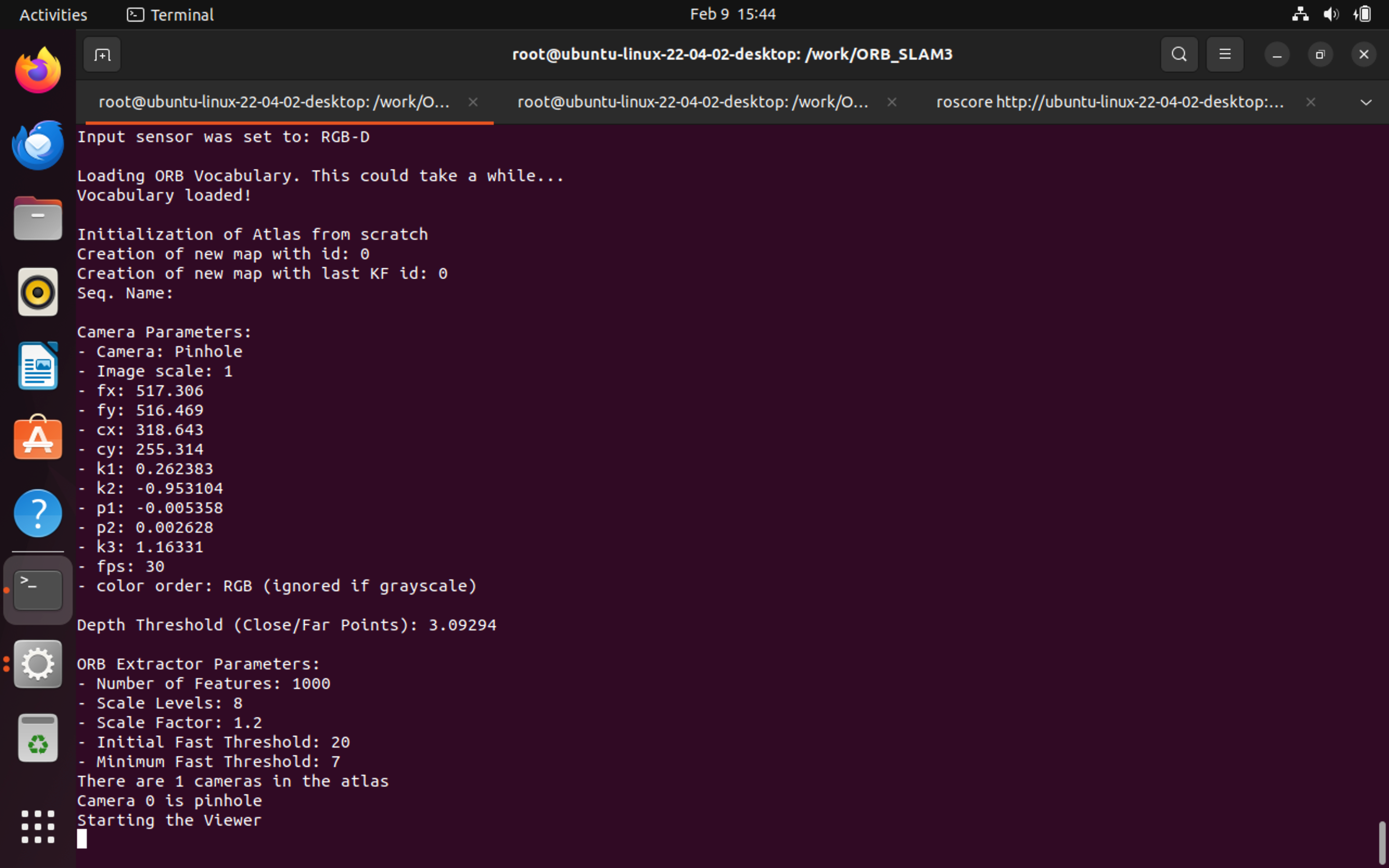
rosrun ORB_SLAM3 Mono Vocabulary/ORBvoc.txt Examples_old/Monocular/TUM1.yaml
执行了之后,就会启动ORB_SLAM3的Map Viewer,此时是黑屏的,因为么有任何数据被送到ORB_SLAM3订阅的Topic中。
再新建一个终端,执行如下命令,将TUM数据集bag文件里面的Topic绑定到ORB_SLAM3订阅的Topic上,这样就能获取到数据了。
rosbag play
datasets/TUM/rgbd_dataset_freiburg1_desk.bag
/camera/rgb/image_color:=/camera/image_raw
其中,最后一个参数/camera/rgb/image_color:=/camera/image_raw指代将bag文件中的/camera/rgb/image_color绑定到/camera/image_raw上,后者就是ORB_SLAM3订阅的相机原始数据的Topic,相当于将bag中已有的图像数据重新喂给了我们的SLAM系统。
因为ROS的Topic机制,这种喂进去的数据集和接一个摄像头得到的实时数据,对于订阅这个Topic的SLAM系统而言是完全一样的!
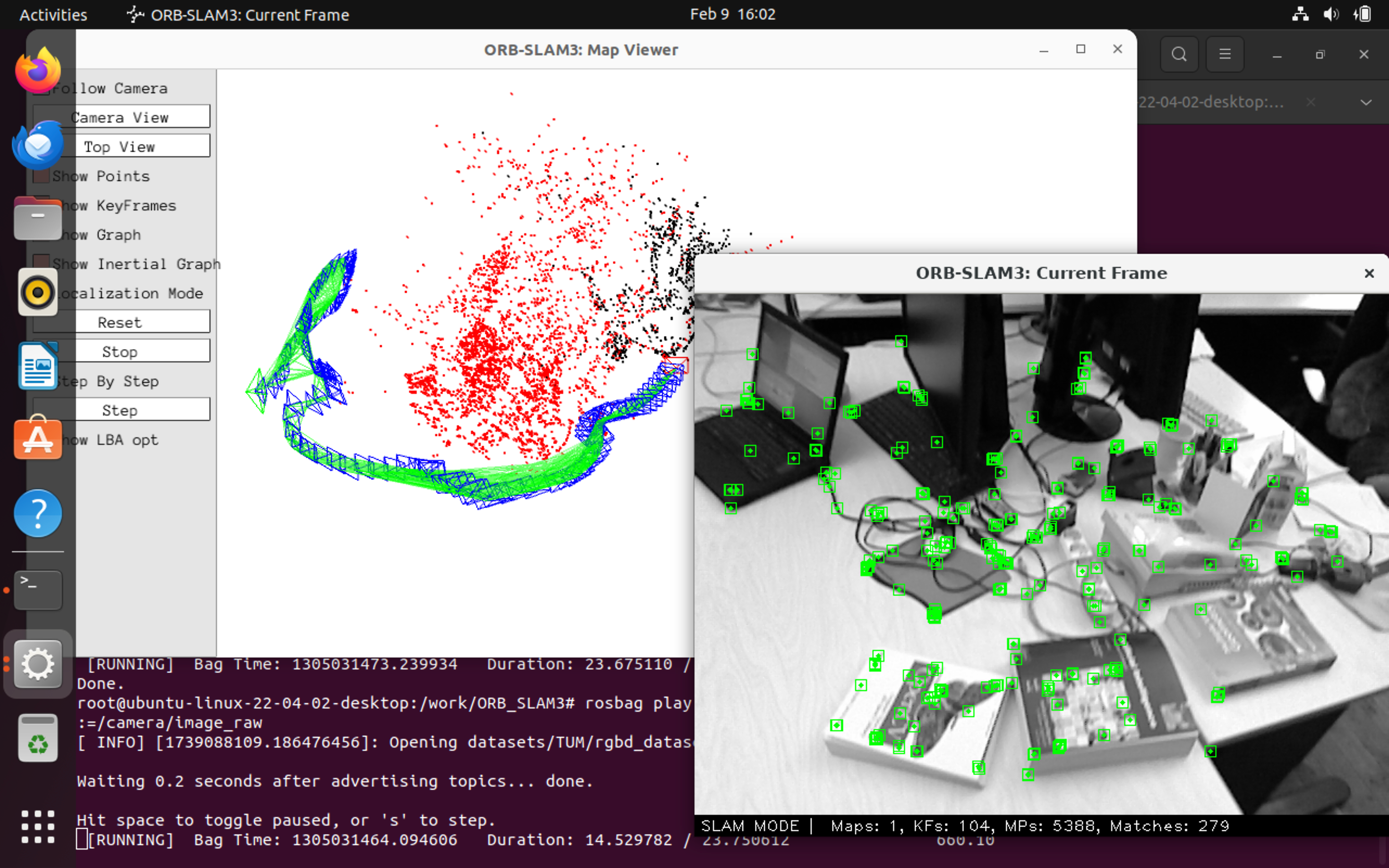
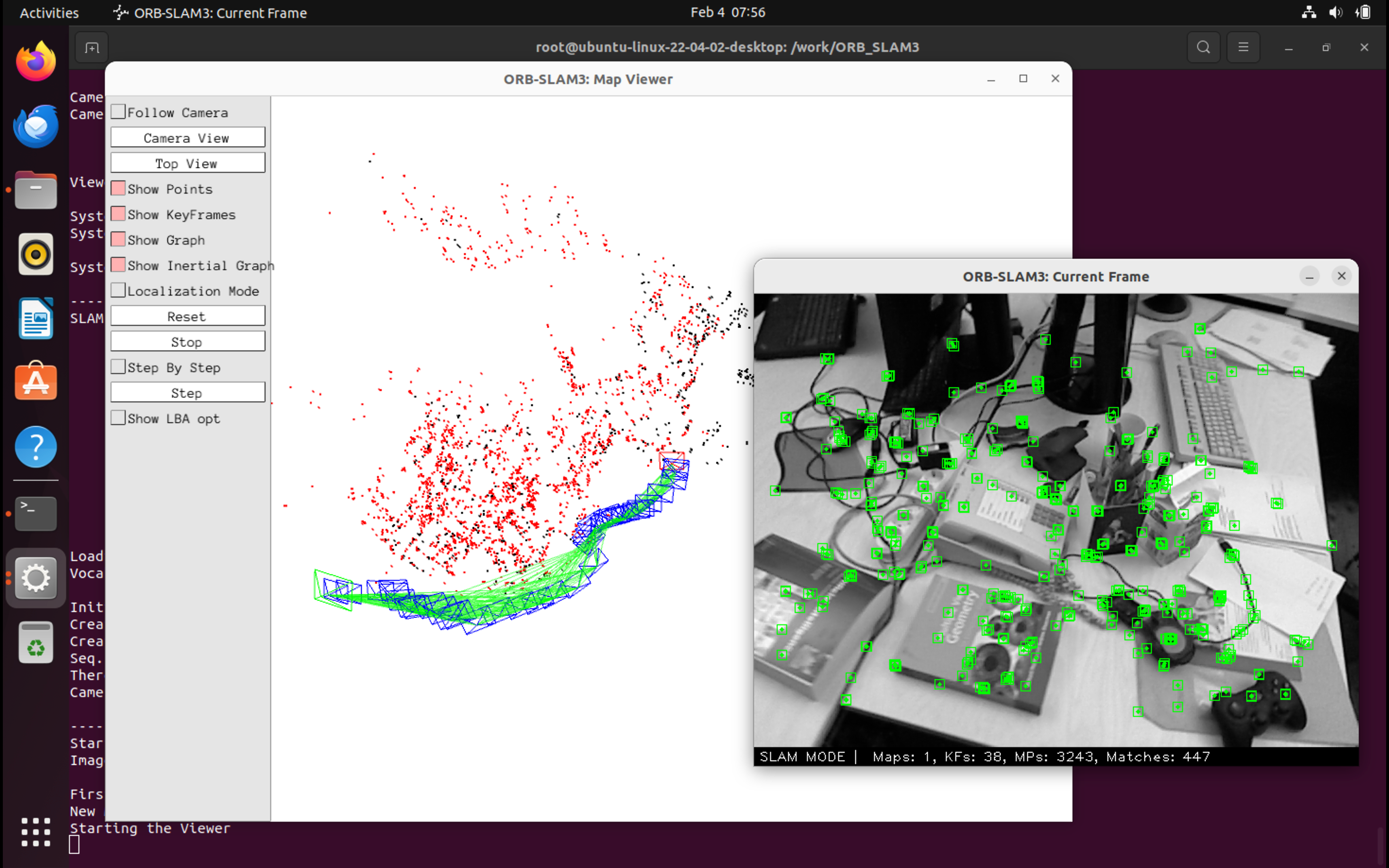
执行这个命令后,就能在GUI里面看到相机的数据流和SLAM的建图了
4.3. RGB-D运行
RGB-D相机也是使用相同的命令来执行,先在另外一个终端执行roscore,然后执行如下命令
rosrun ORB_SLAM3 RGBD Vocabulary/ORBvoc.txt Examples_old/RGB-D/TUM1.yaml
刚启动的时候也是黑屏
再开另外一个终端,开始喂我们的数据集,这里用了两个:=号,分别绑定了原始的RGB相机数据到/camera/rgb/image_raw ,绑定了深度数据到/camera/depth_registered/image_raw上
rosbag play
datasets/TUM/rgbd_dataset_freiburg1_desk.bag
/camera/rgb/image_color:=/camera/rgb/image_raw
/camera/depth/image:=/camera/depth_registered/image_raw
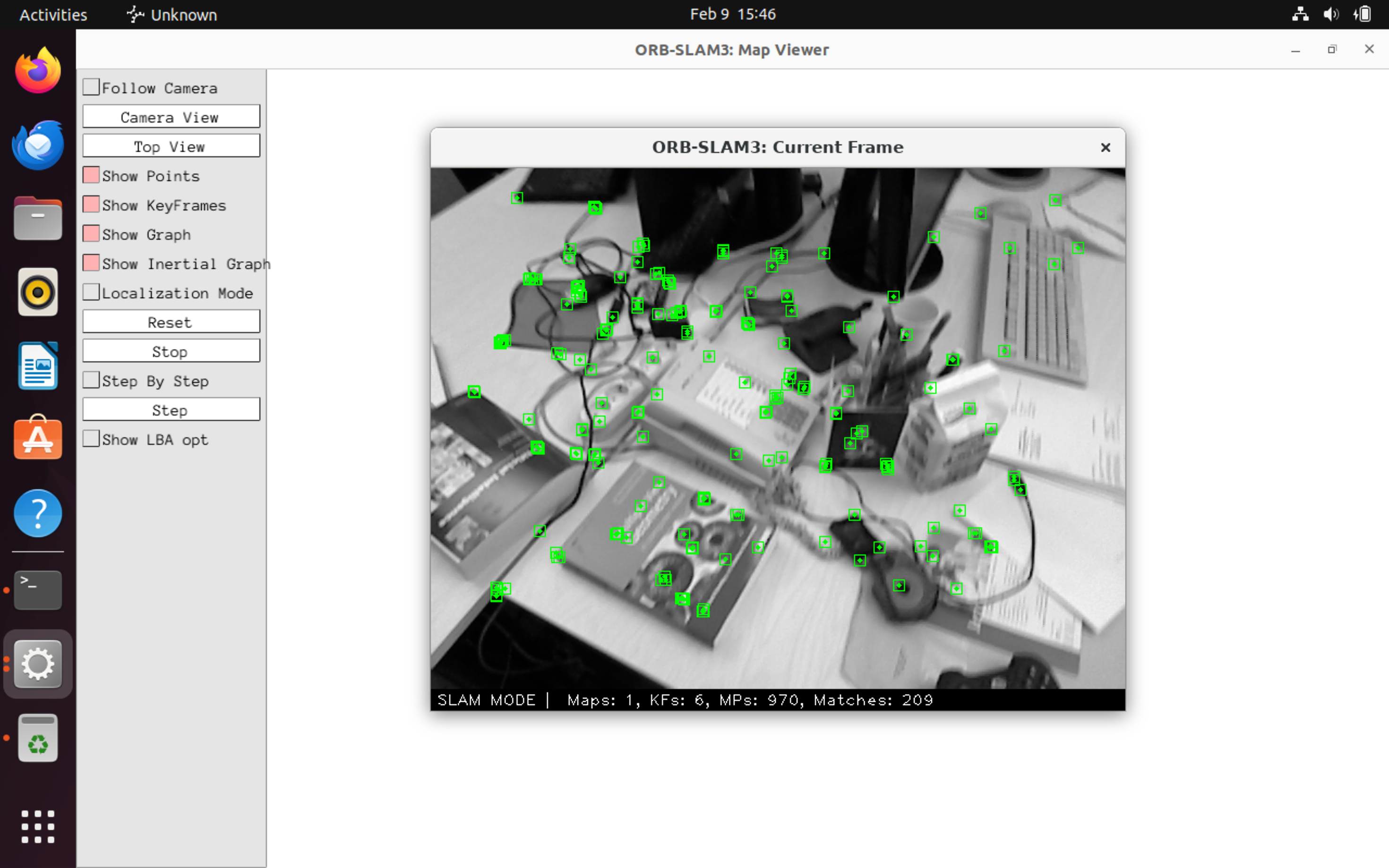
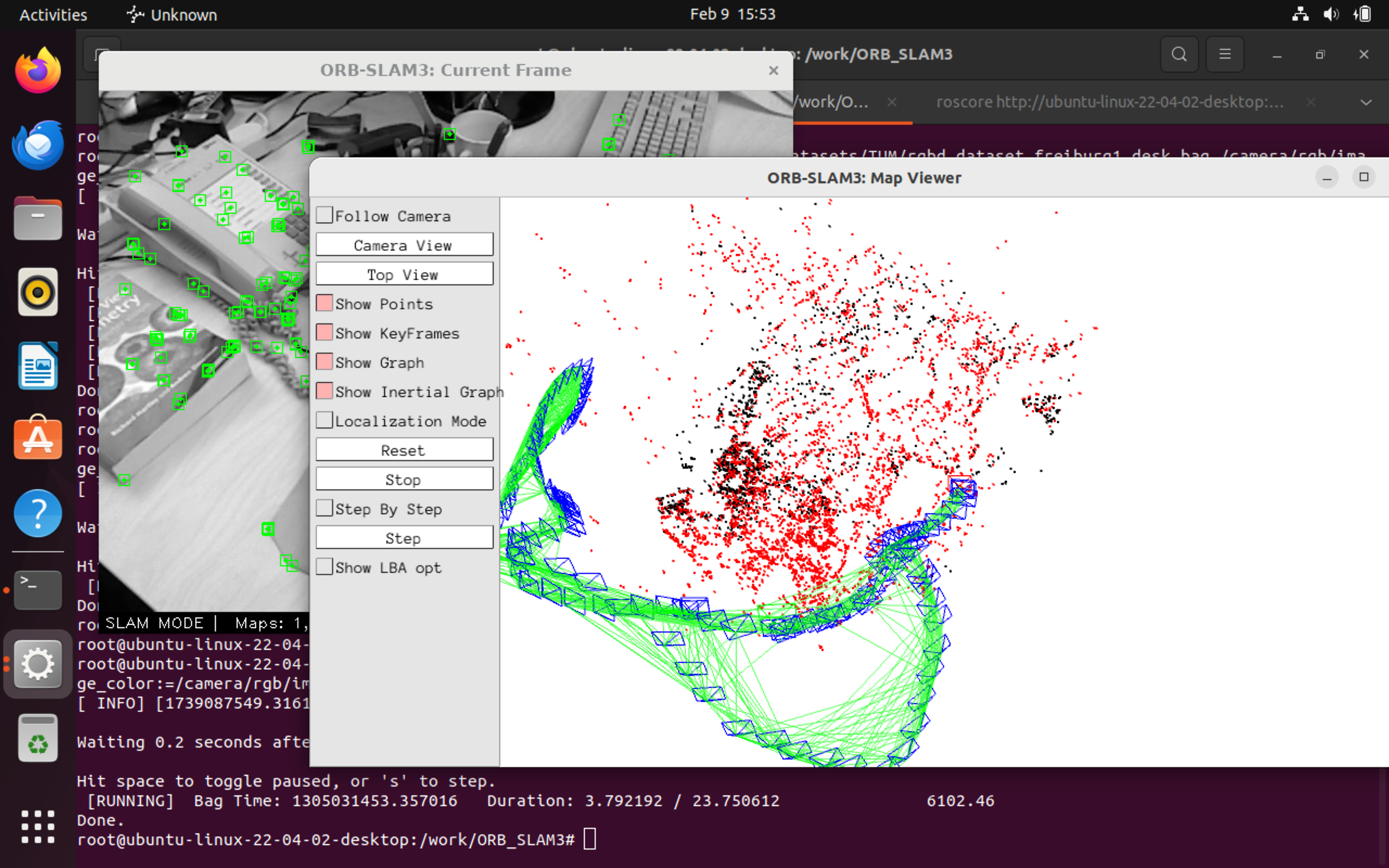
随后GUI里面也开始显示图像了
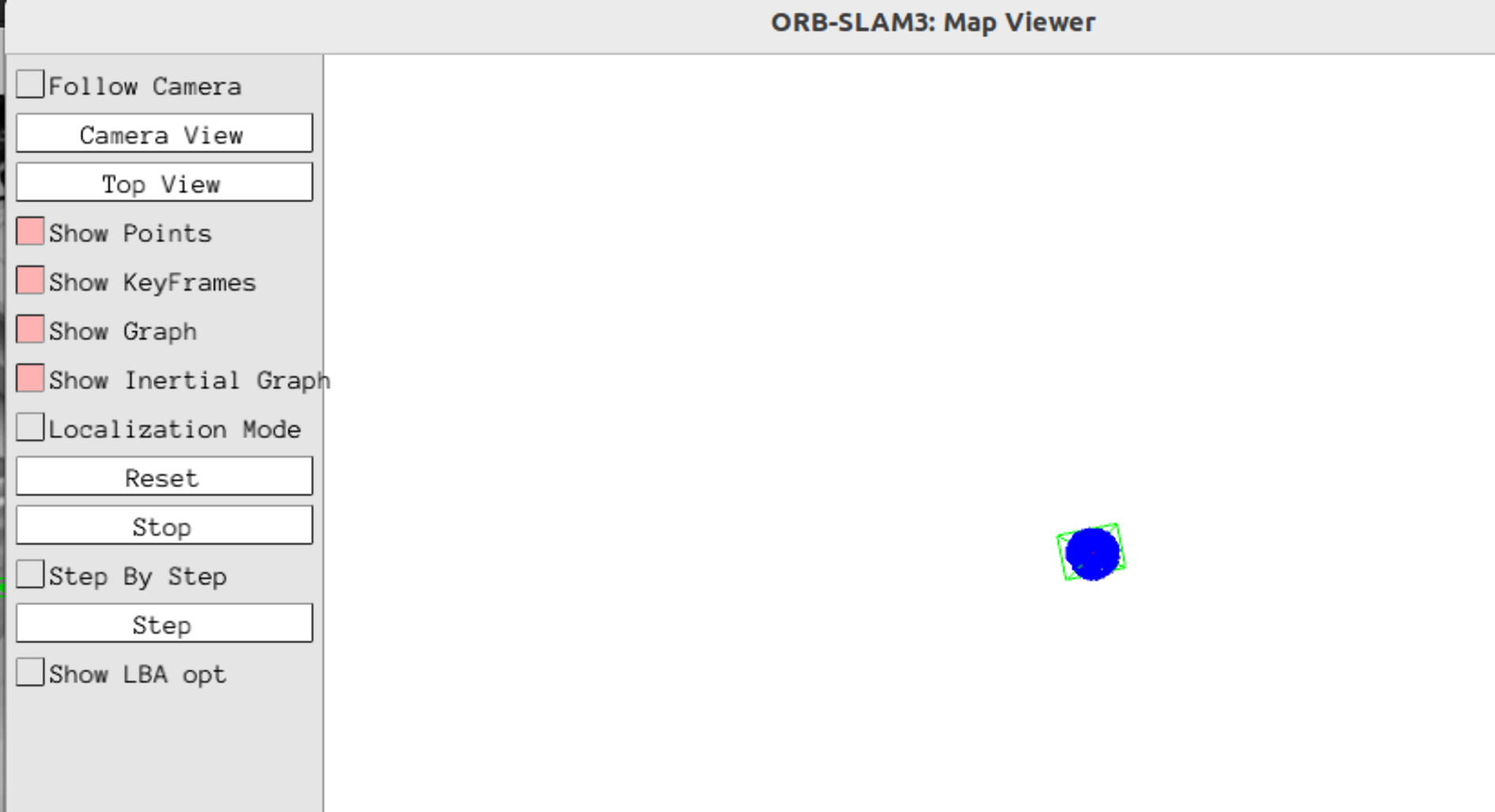
等运行结束后,会发现此时SLAM的建图结果是不对的,所有的点都在很小的一块区域中
作为对比,下图为本地虚拟机在普通模式下运行时的RGB-D建图结果,很明显和上图完全不一样。
这是因为Examples_old/RGB-D/TUM1.yaml数据配置有问题。在TUM官网上提到了这两个数据集在ROS和非ROS中是不一样的,实际上这个文件里面也有注释
# Deptmap values factor
DepthMapFactor: 5000 # 1.0 for ROS_bag
官网说明:cvg.cit.tum.de/data/datasets/rgbd-dataset/file_formats#intrinsic…
Color images and depth maps
We provide the time-stamped color and depth images as a gzipped tar file (TGZ).
- The color images are stored as 640x480 8-bit RGB images in PNG format.
- The depth maps are stored as 640x480 16-bit monochrome images in PNG format.
- The color and depth images are already pre-registered using the OpenNI driver from PrimeSense, i.e., the pixels in the color and depth images correspond already 1:1.
- The depth images are scaled by a factor of 5000, i.e., a pixel value of 5000 in the depth image corresponds to a distance of 1 meter from the camera, 10000 to 2 meter distance, etc. A pixel value of 0 means missing value/no data.
这里是深度值的校正系数(factor),使用时的计算公式为Z = depth_image[v,u] / factor,在ROS中要把它改成1才可以。
factor = 5000 # for the 16-bit PNG files
factor = 1 # for the 32-bit float images in the ROS bag files
将DepthMapFactor修改为1.0之后的建图就正常一些了
4.4. 双目运行
下载EuRoC对应的rosbag:MH_01_easy.bag,上文已经给出过该数据集对应的Topic了,其中要用到的 Topic 是左右两个摄像头的数据 /cam0/image_raw 和 /cam1/image_raw。ORB_SLAM3 中双目 Stereo 接收的 Topic 分别为 /camera/left/image_raw 和 /camera/right/image_raw,因此在运行时也需要绑定一下 Topic。
topics: /cam0/image_raw 3682 msgs : sensor_msgs/Image
/cam1/image_raw 3682 msgs : sensor_msgs/Image
/imu0 36820 msgs : sensor_msgs/Imu
/leica/position 3099 msgs : geometry_msgs/PointStamped
双目的rosrun命令最后多了一个bool类型参数do_rectify,含义为是否进行矫正,根据需要选择true或false。
Usage: rosrun ORB_SLAM3 Stereo path_to_vocabulary path_to_settings do_rectify
执行如下命令,先启动Stereo双目模式下的SLAM,然后开始播放数据集,同样是使用:=分别绑定左侧和右侧两个摄像头的数据。
# 终端a
roscore
# 终端b
rosrun ORB_SLAM3 Stereo Vocabulary/ORBvoc.txt Examples_old/Stereo/EuRoC.yaml true
# 终端c
rosbag play MH_01_easy.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_raw
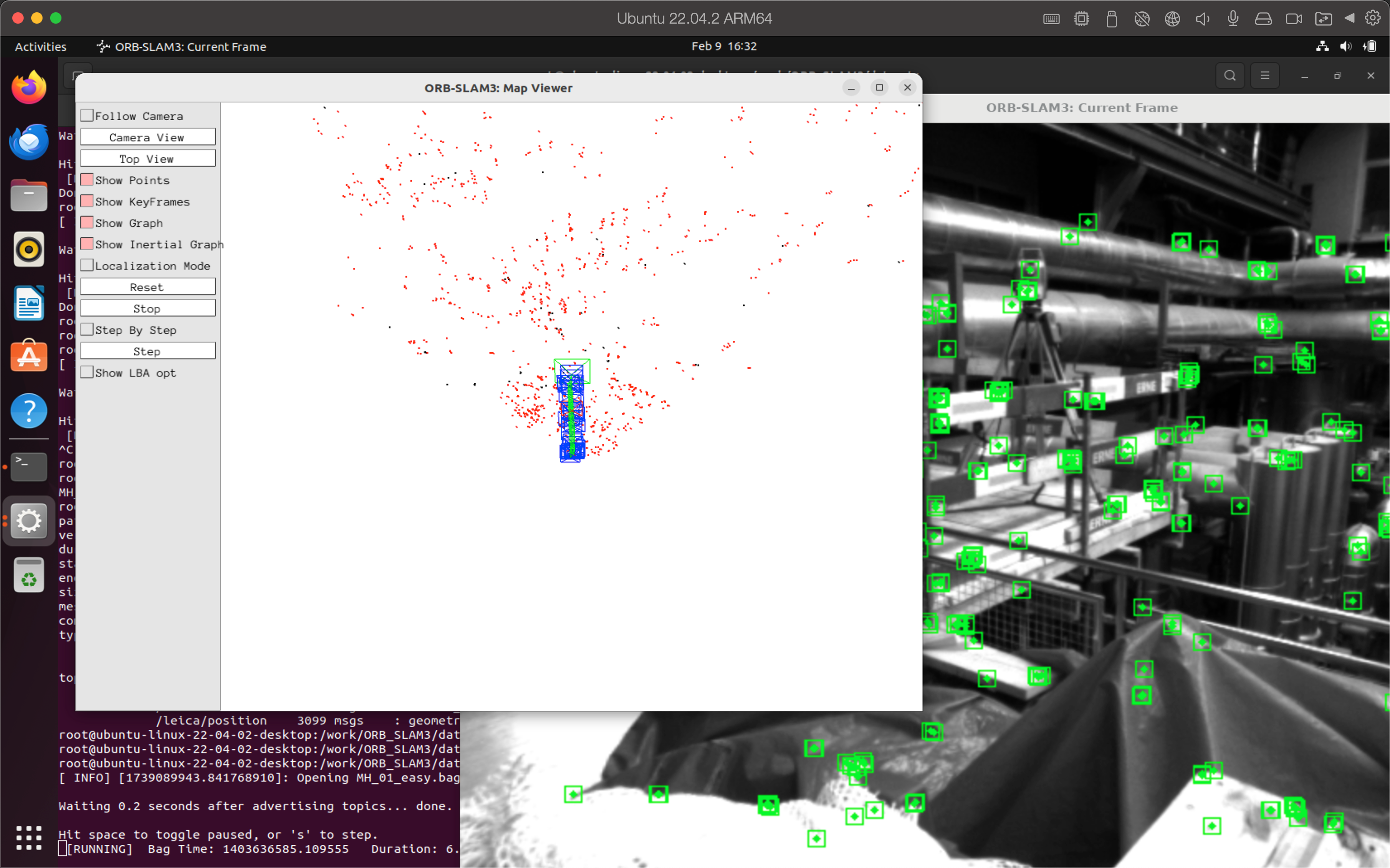
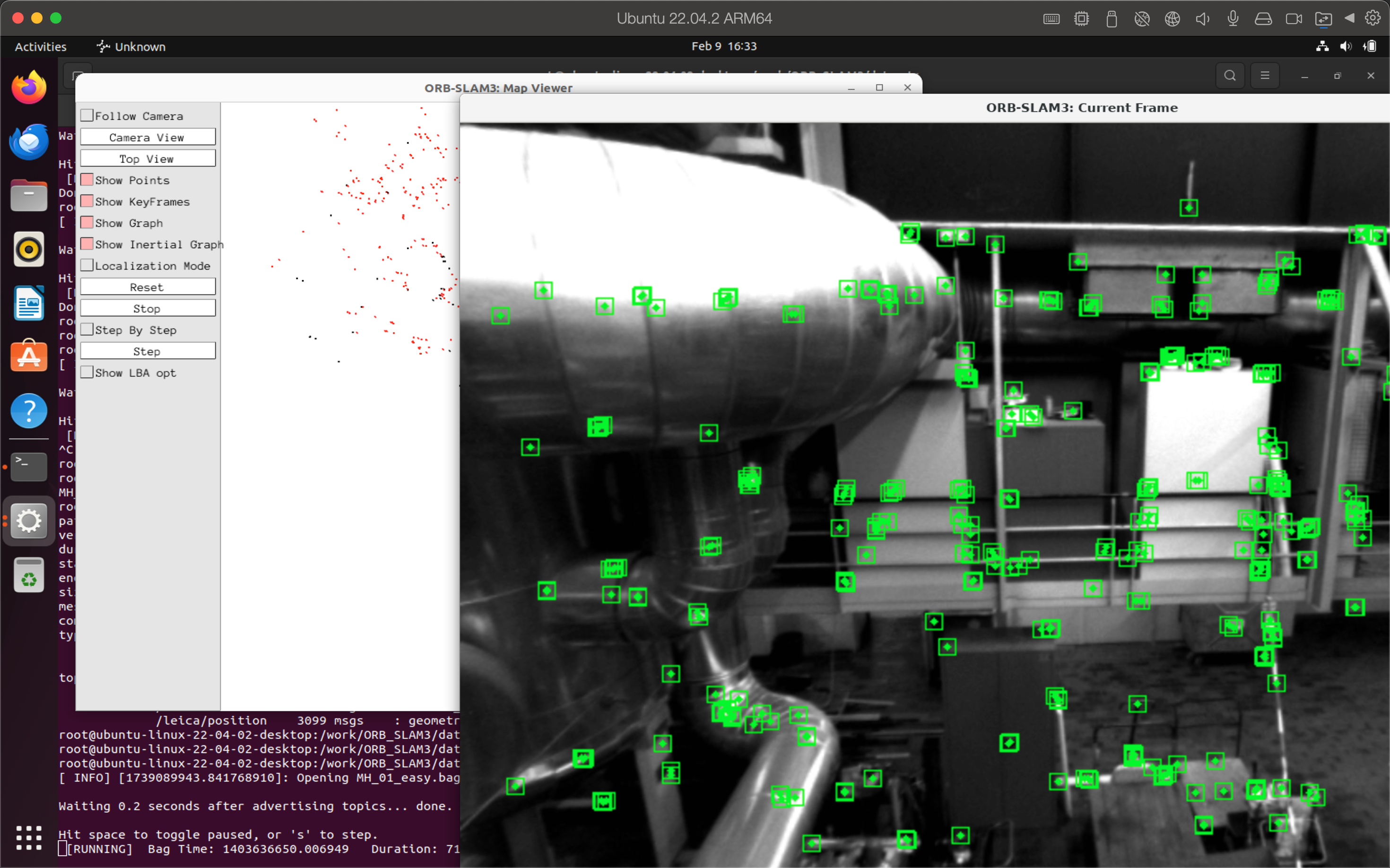
也是成功运行起来了
5. The end
本文介绍了如何在ROS环境下编译ORB_SLAM3,并使用TUM和EuRoC数据集测试单目、双目、RGB-D三种模式在ROS下运行的效果。希望对你有帮助!
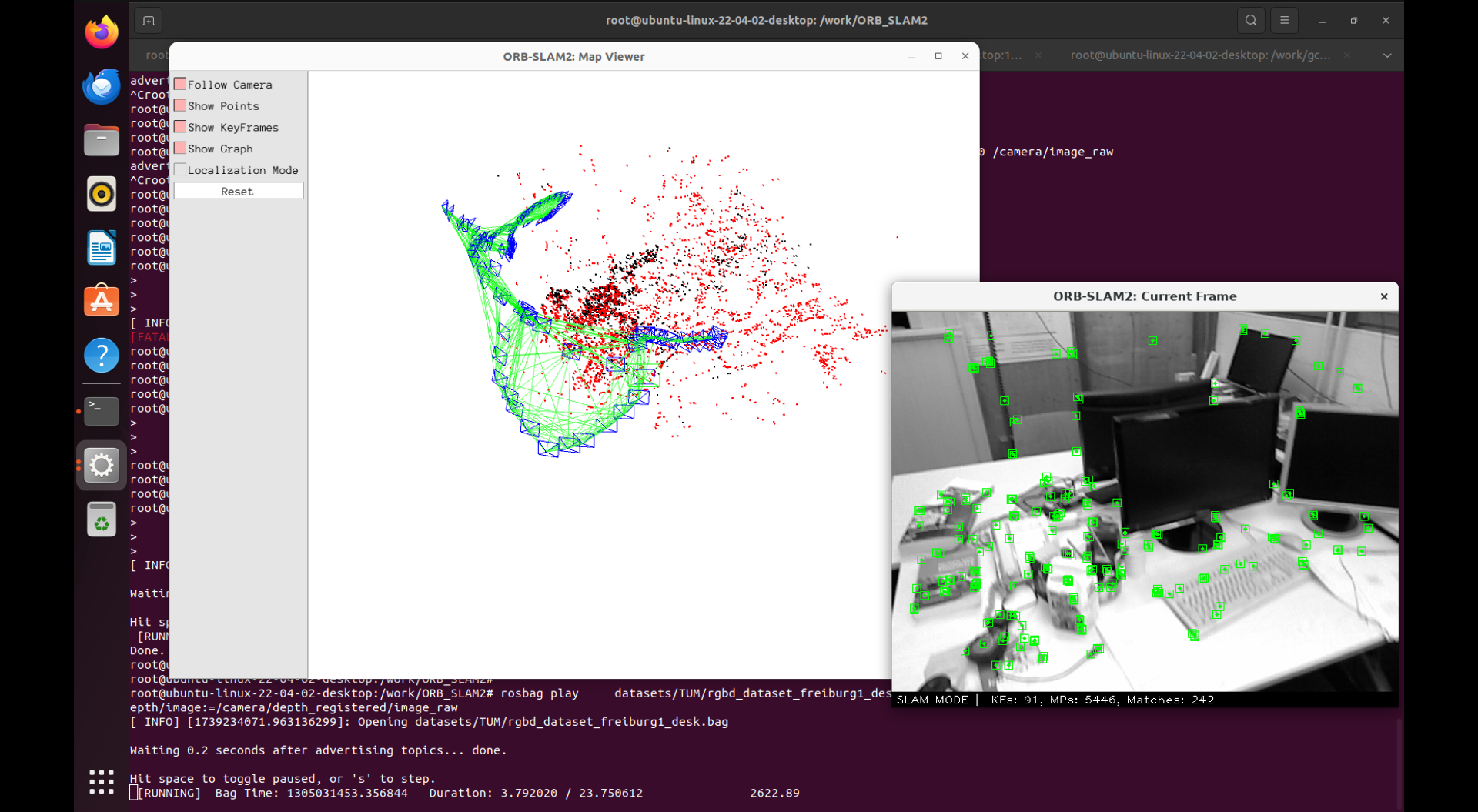
更新:ORB_SLAM2的ROS运行命令和本文记录的完全一致,只需要把rosrun里面的包名改成ORB_SLAM2就可以了。下图是在ROS模式下运行ORB_SLAM2的RGB-D的截图。