
1、本项目基本遵循苍穹四轴DIY给出的教程,但是由于各个库的版本更新,在环境配置过程中遇到了很多问题,原有教程难以解决,


1、本项目基本遵循苍穹四轴DIY给出的教程,但是由于各个库的版本更新,在环境配置过程中遇到了很多问题,原有教程难以解决,
本文所有资源在QQ群640188690文件分享,欢迎加入! 1.ROS-noetic版本安装 使用fishros(鱼香ROS)一键安装: wget http://fishr

1、本项目基本遵循苍穹四轴DIY给出的教程,但是由于各个库的版本更新,在环境配置过程中遇到了很多问题,原有教程难以解决,
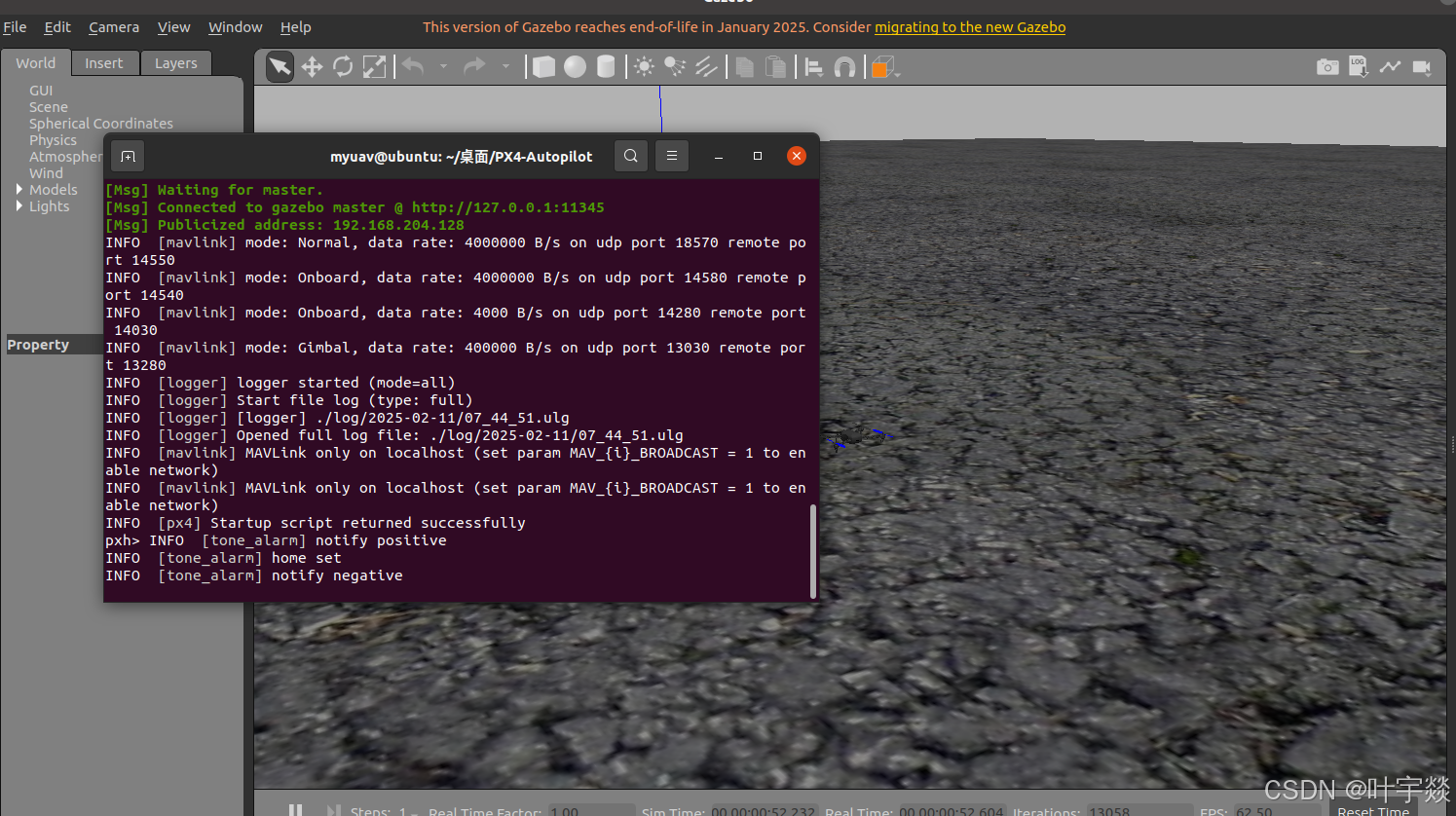
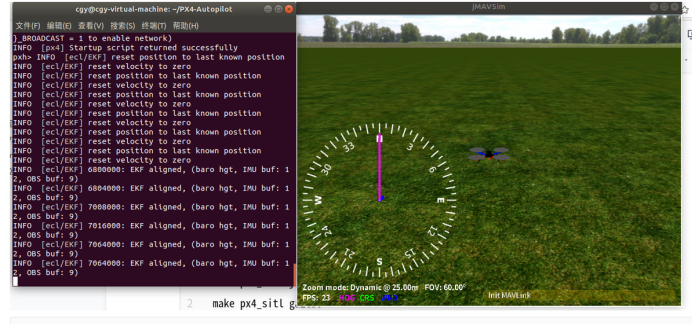
目录 前言 一、安装ROS 二、安装PX4 编译 三、QGC安装 四、安装MAVROS 命令记得加sudo! 前言 在安装ubuntu20.04+ROS+Gazeb
前面我已经实现了fast_lio建图并使用octomap转为三维栅格地图,今天来填上次留的坑 使用Livox-Mid360激光雷达,复现FAST_LIO(

在Ubuntu20.04系统下安装无人机PX4飞控仿真环境 一. 前言 二. PX4飞控 1.介绍 2.安装 三. MAVROS 1.介绍 2.安装
文章目录 系统环境安装依赖PX4 安装老版本安装测试环境变量添加版本查看 安装MAVROS(二进制安装非源码安装)第二种方法测
目录 1 PX4环境搭建 1.1 下载 PX4 源码 1.2 运行 ubuntu.sh 安装所有工具链 1.3 环境配置验证 2 ROS搭建 2.1 添加ROS软件源 2.

作者:Yonglin Tian, Fei Lin, Yiduo Li, Tengchao Zhang, Qiyao Zhang, Xuan Fu, Jun Huang, Xingyuan Dai, Yutong Wang, C
