
【WSL2】 Ubuntu20.04 GUI图形化界面 VcXsrv ROS noetic Vscode 主机代理 配置 前言整体思路安装 WSL2Windows 环境升级为

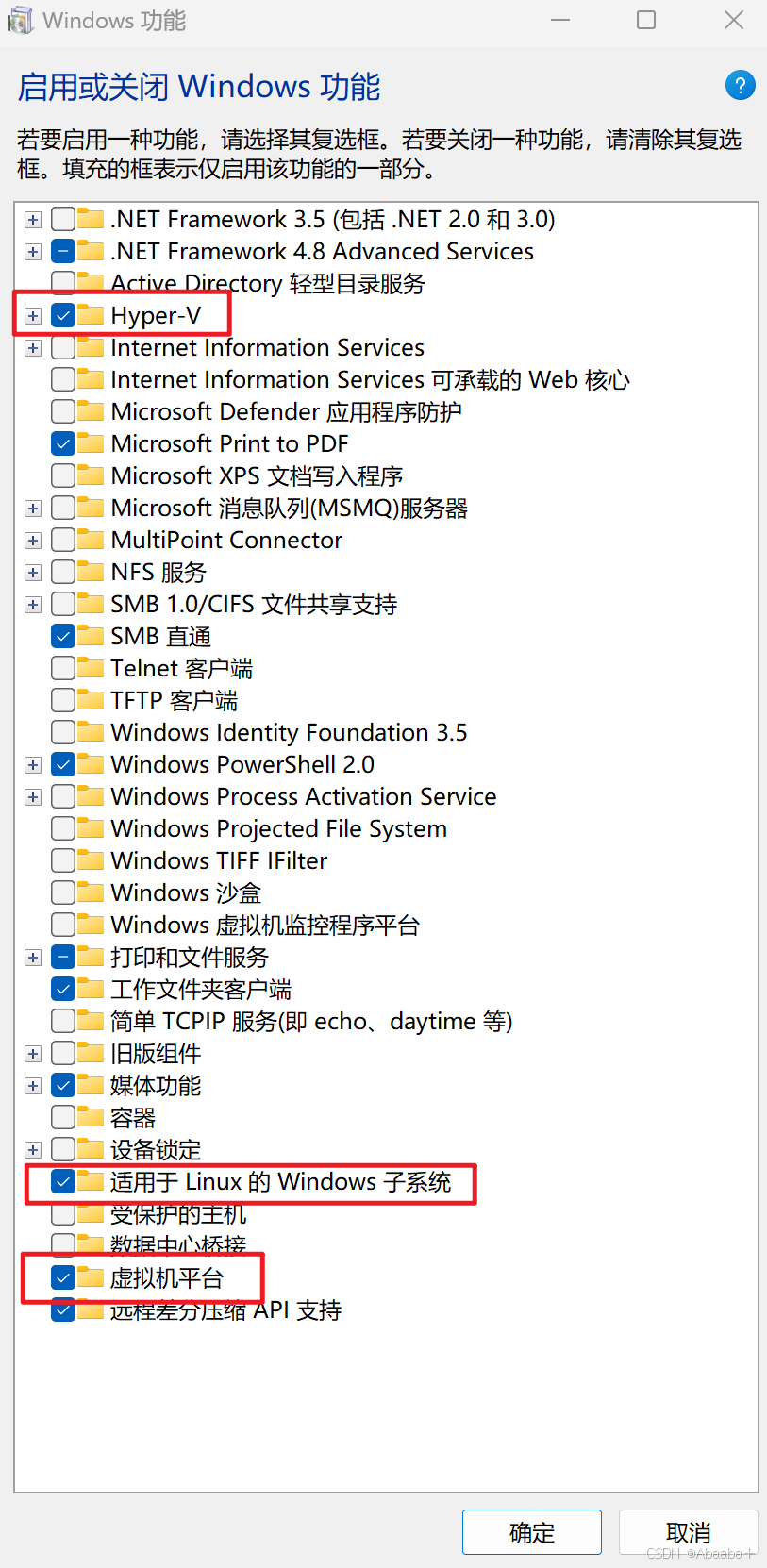
【WSL2】 Ubuntu20.04 GUI图形化界面 VcXsrv ROS noetic Vscode 主机代理 配置 前言整体思路安装 WSL2Windows 环境升级为

水下世界仿真系列文章目录 第一章 水下世界仿真之UUV Simulator 安装 文章目录 水下世界仿真系列文章目录前言一、下载并安

文章目录 前言鱼香ROS1 一键安装:快速搭建开发环境2 具体使用2.1 如何开始?2.2 我的常用配置方案2.3 安装示例 3 总结相
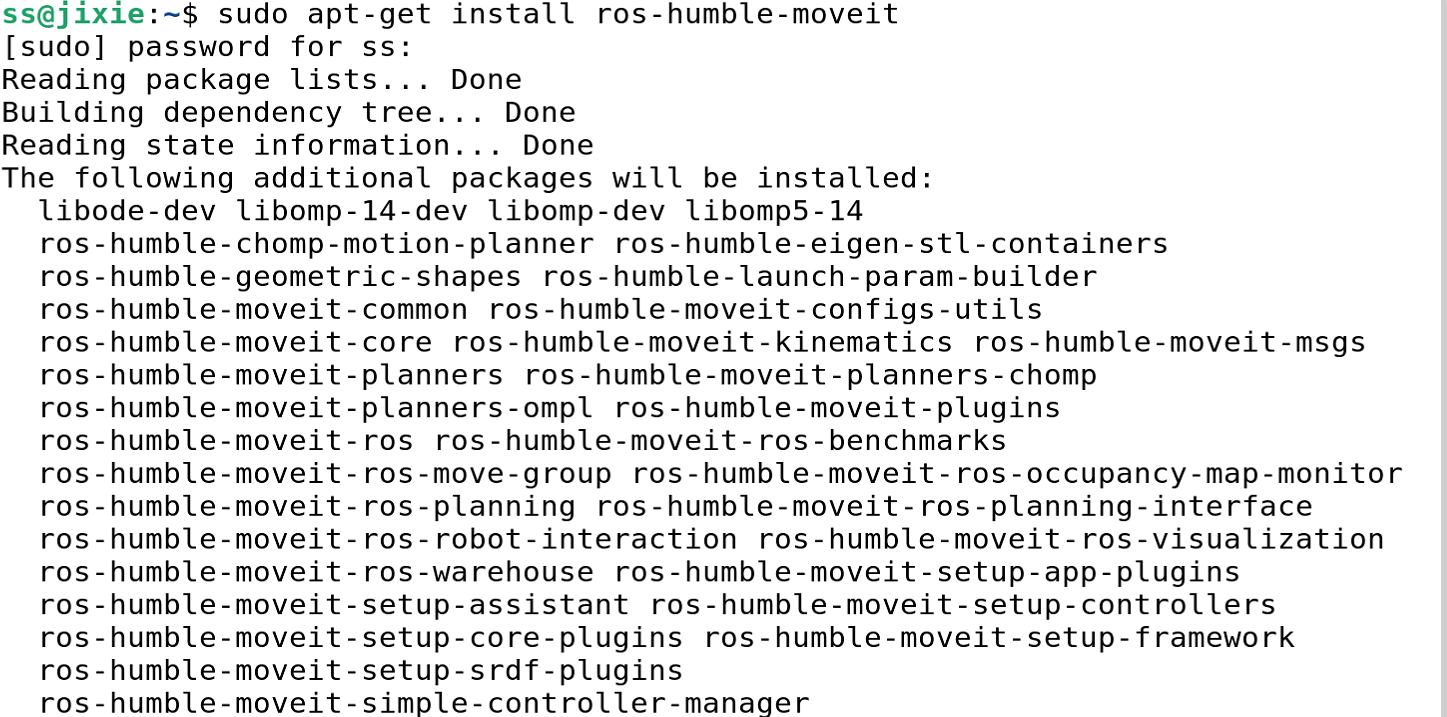
通过本篇文章学习,你可以收获以下内容: 学会在 Ubuntu22.04 上安装 Moveit2学会下载编译运行 Moveit2 样例程序学会使用样例程
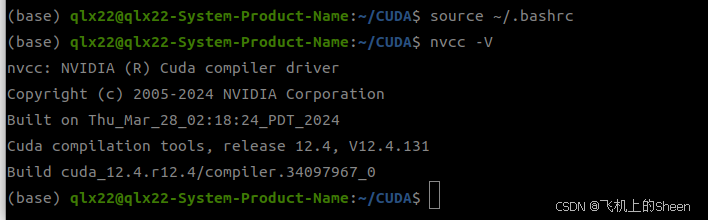
NVIDIA官网指令安装自己需要的CUDA版本,可 然后使用nvcc -V命令验证版本时报错: 找不到命令 “nvcc”,但可以通过以下软件包安
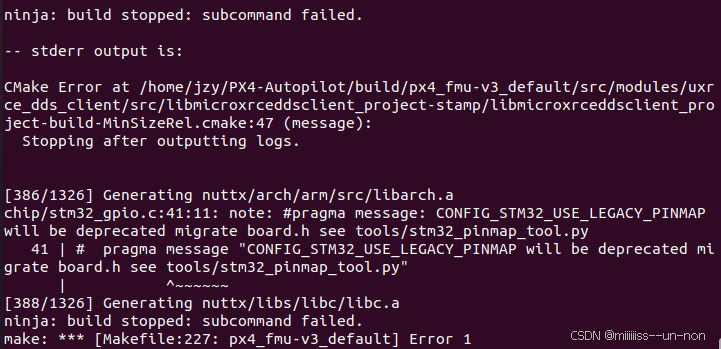
目录 1 PX4环境搭建 1.1 下载 PX4 源码 1.2 运行 ubuntu.sh 安装所有工具链 1.3 环境配置验证 2 ROS搭建 2.1 添加ROS软件源 2.
介绍 rviz: RViz 是 ROS(机器人操作系统)中的可视化工具。它就像是一个 “机器人世界的窗口”,让你能够看到机器人内部的数据

本文所有资源在QQ群640188690文件分享,欢迎加入! 1.ROS-noetic版本安装 使用fishros(鱼香ROS)一键安装: wget http://fishr
