
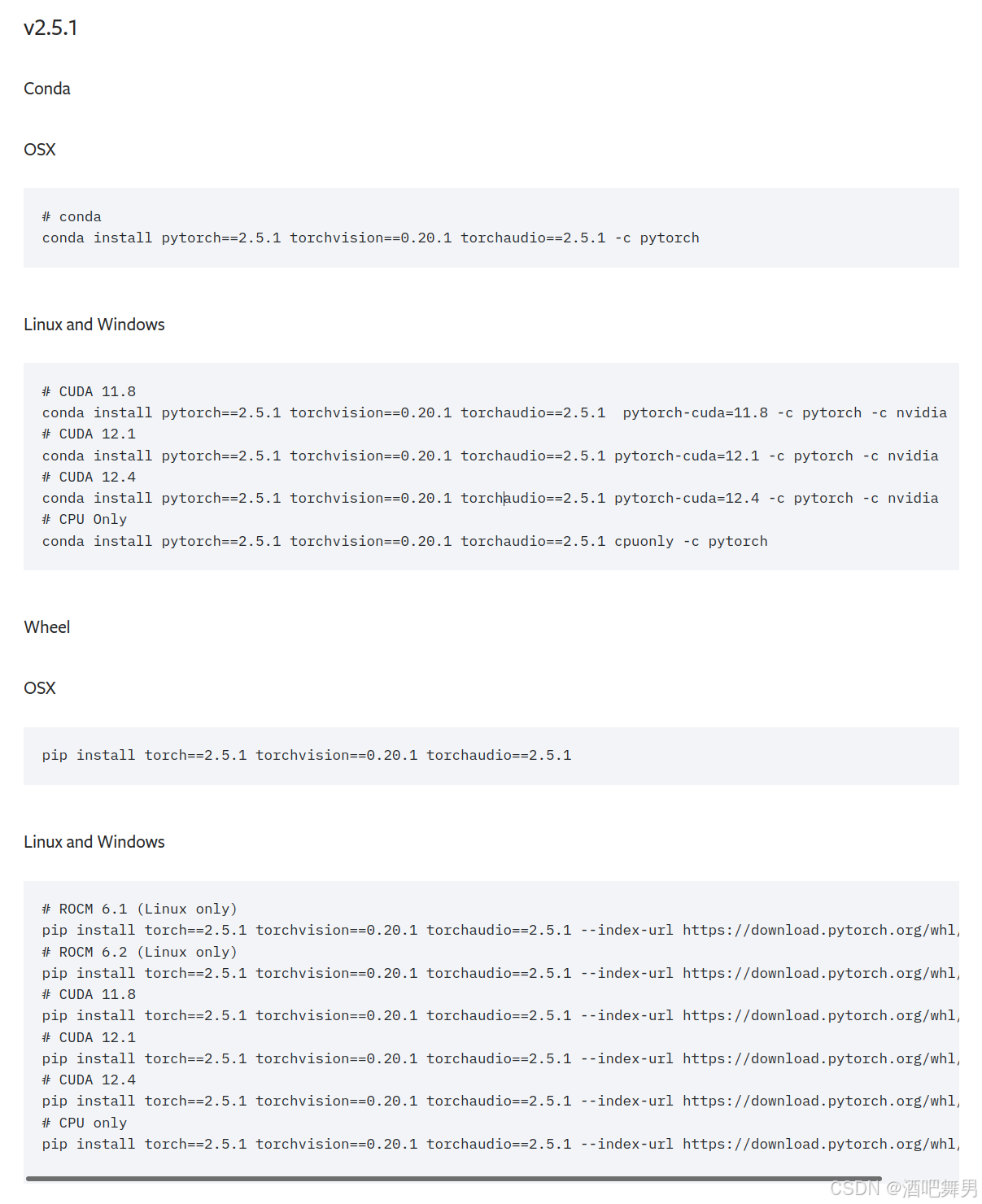
2025年之后omniverse好像不能直接装Isaac sim了,要跳转到官网链接。 Isaac lab要在Isaac sim安装之后才能安装 Ubuntu20.0

2025年之后omniverse好像不能直接装Isaac sim了,要跳转到官网链接。 Isaac lab要在Isaac sim安装之后才能安装 Ubuntu20.0
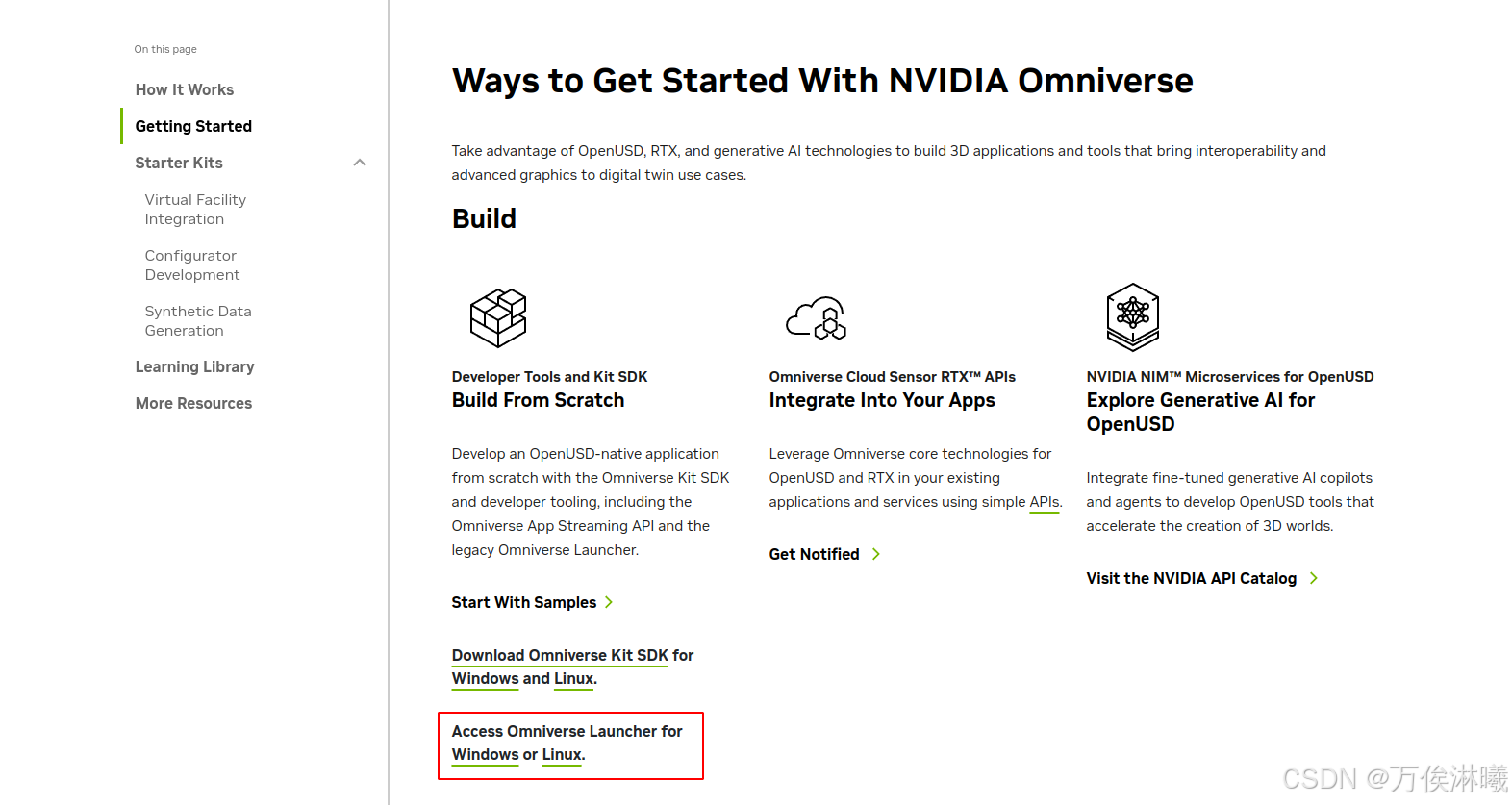
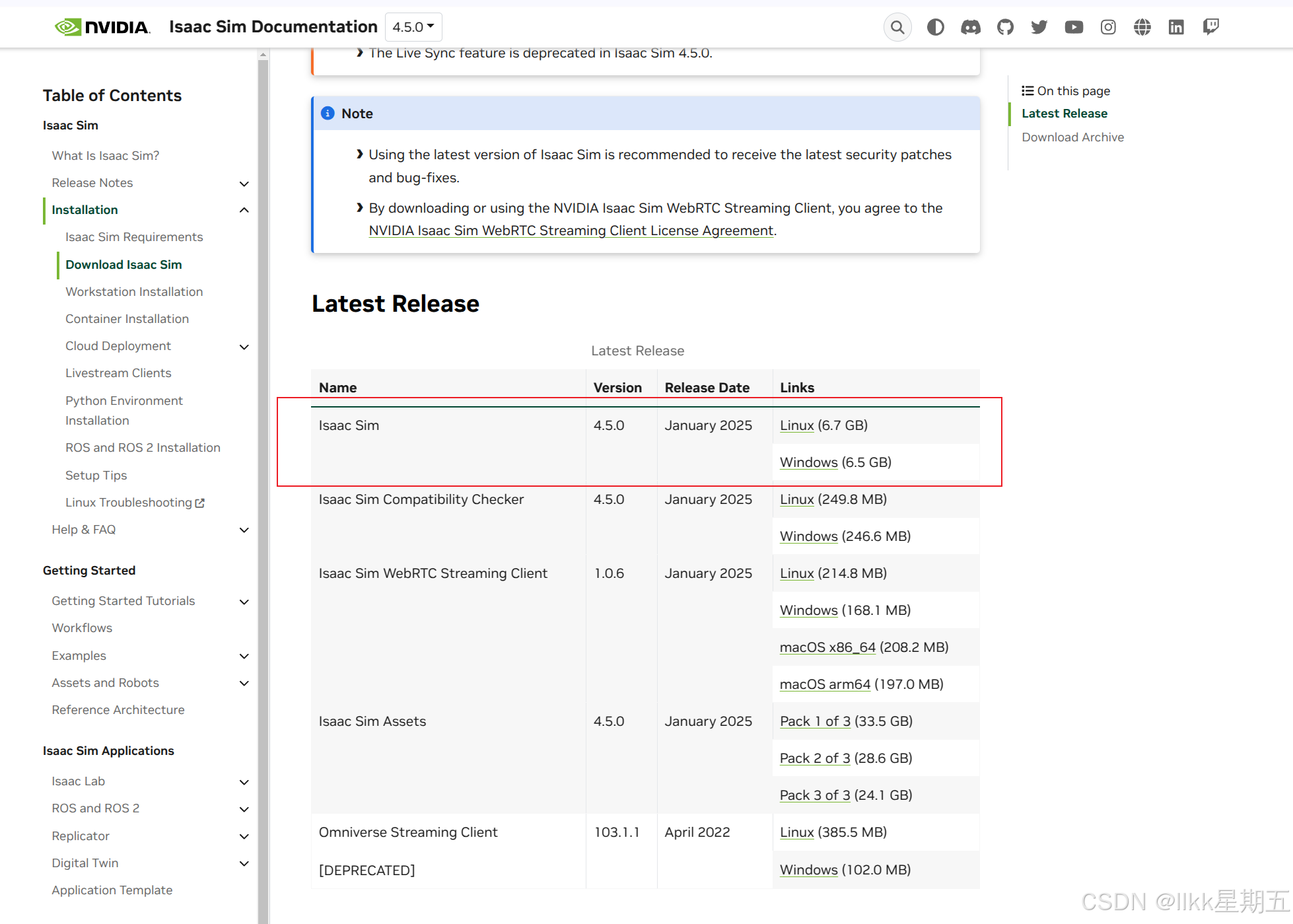
目录 一、安装Omniverse Launcher二、检查兼容性三、安装 Isaac Sim四、运行 Isaac Sim NVIDIA Isaac Sim是NVIDIA推出的

目录 一、从官网上下载UR机械臂 二、给UR机械臂添加夹爪 三、报错解决 本文详细介绍如何在Ubuntu20.04+ROS环境中为Universal
水下世界仿真系列文章目录 第一章 水下世界仿真之UUV Simulator 安装 文章目录 水下世界仿真系列文章目录前言一、下载并安
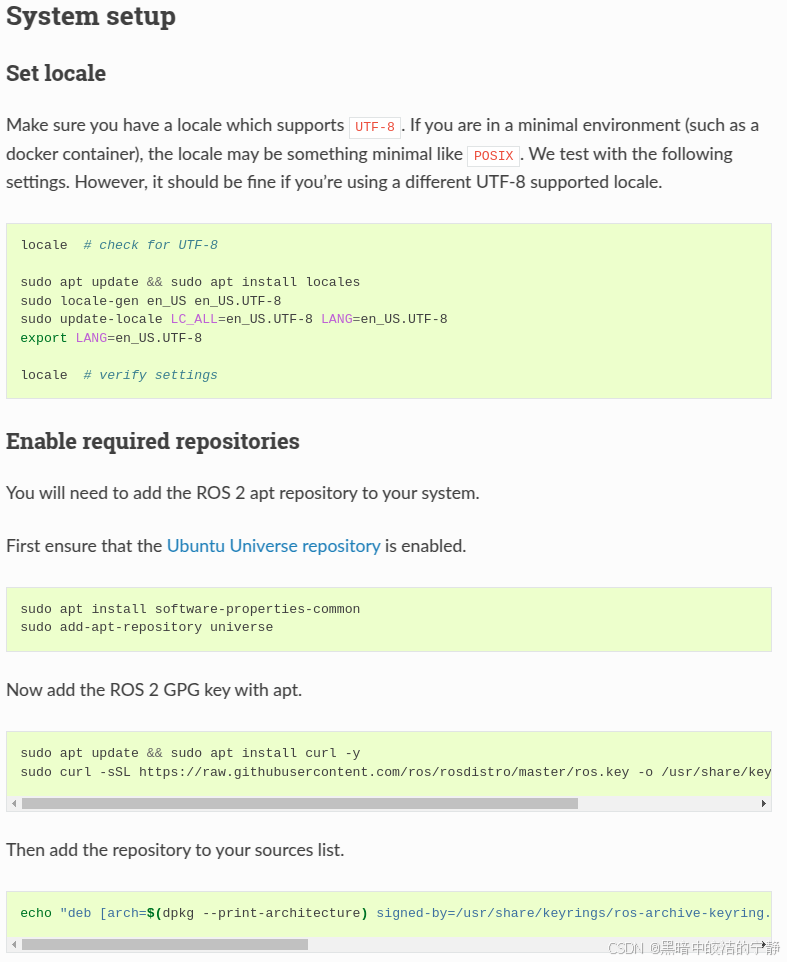
文章目录 前言 1. ROS2安装 2. Gazebo安装 3. Nav2安装 前言 2025.2.13 自用。Ubuntu安装见上篇。 目前已无须修改为清

Ubuntu20.04本地配置IsaacLab 4.5.0的训练环境(一) 配置conda虚拟环境(对于这一步,个人感觉跟在配置IsaacLab那一节的.
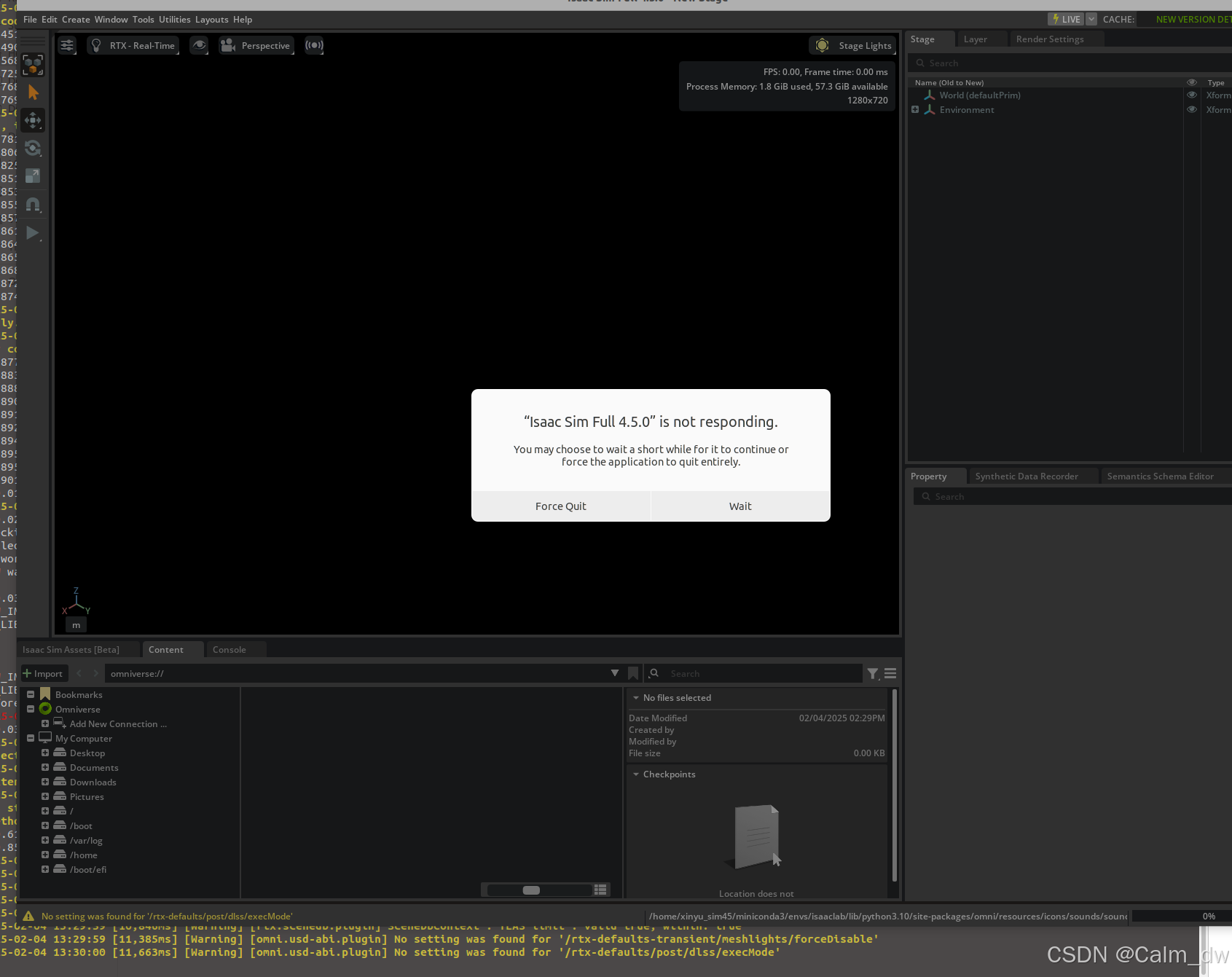
拖了几个月,终于录了一个安装视频在b站: IsaacLab最新2025教程-环境配置(IsaacSim 4.5.0/Ubuntu22.04) 原创_哔哩哔哩_bilibi
前面我已经实现了fast_lio建图并使用octomap转为三维栅格地图,今天来填上次留的坑 使用Livox-Mid360激光雷达,复现FAST_LIO(
