
🌈个人主页:秦jh__https://blog.csdn.net/qinjh_?spm=1010.2135.3001.5343🔥 系列专栏:https://blog.csdn


🌈个人主页:秦jh__https://blog.csdn.net/qinjh_?spm=1010.2135.3001.5343🔥 系列专栏:https://blog.csdn

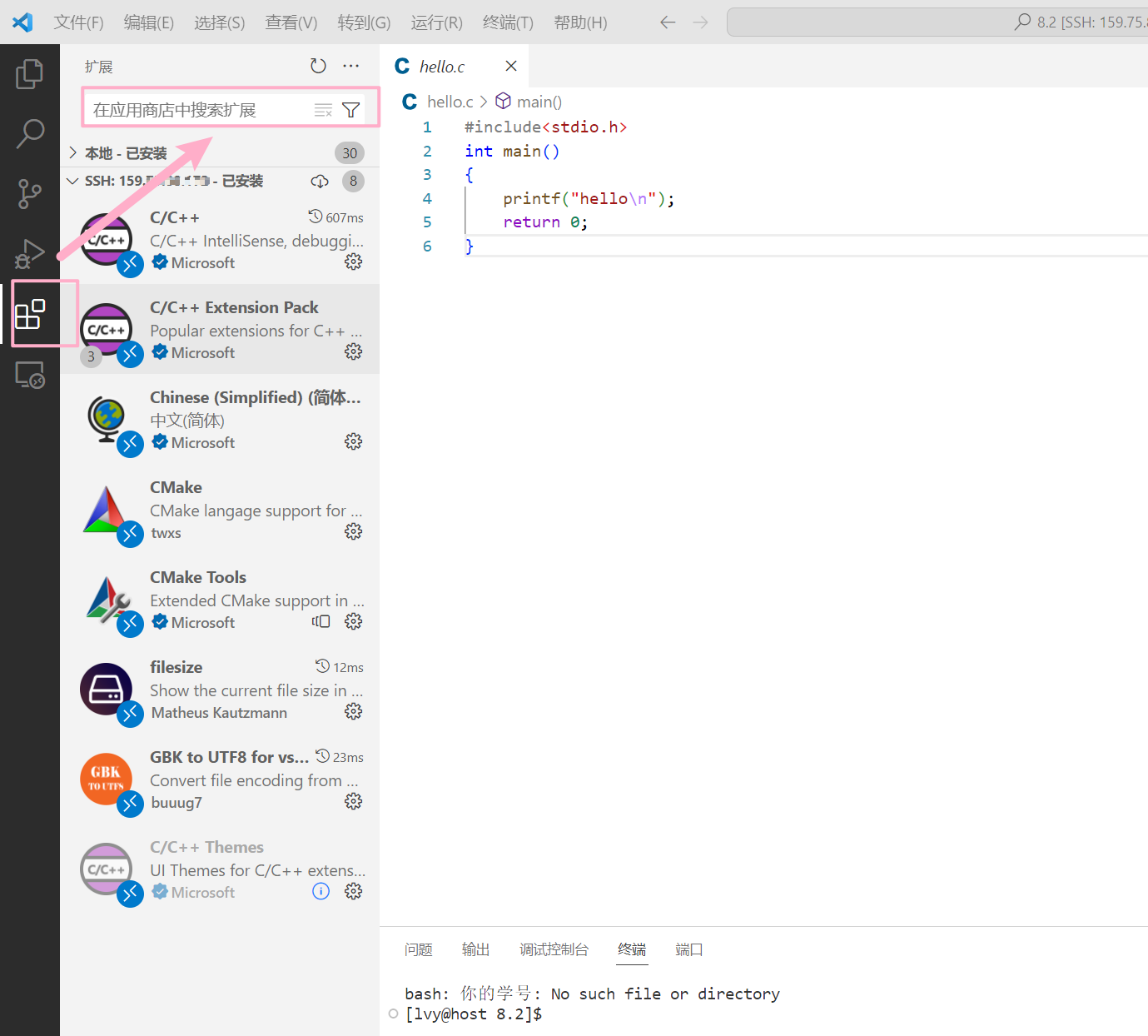
目录 0. 引入:vscode 的使用 下载 推荐插件 连接云服务器 1. 进程间通信 1.1 是什么 1.2 为什么 1.3 怎么办 介绍 : 2. 匿名管

麒麟系统x86架构项目部署 1、安装jdk 解压jdk # 解压jdktar -zxvf jdk-8u441-linux-x64.tar.gz 配置环境变量 # 配置环境变量

往期内容 本专栏往期内容:Uart子系统 UART串口硬件介绍深入理解TTY体系:设备节点与驱动程序框架详解Linux串口应用编程:从

在ubuntu18.04arm中于ROS环境编译与运行ORB_SLAM3,并以TUM和EuRoC数据集测试了ROS下单目、双目和RGB-D运行。 1. 引言 在之前
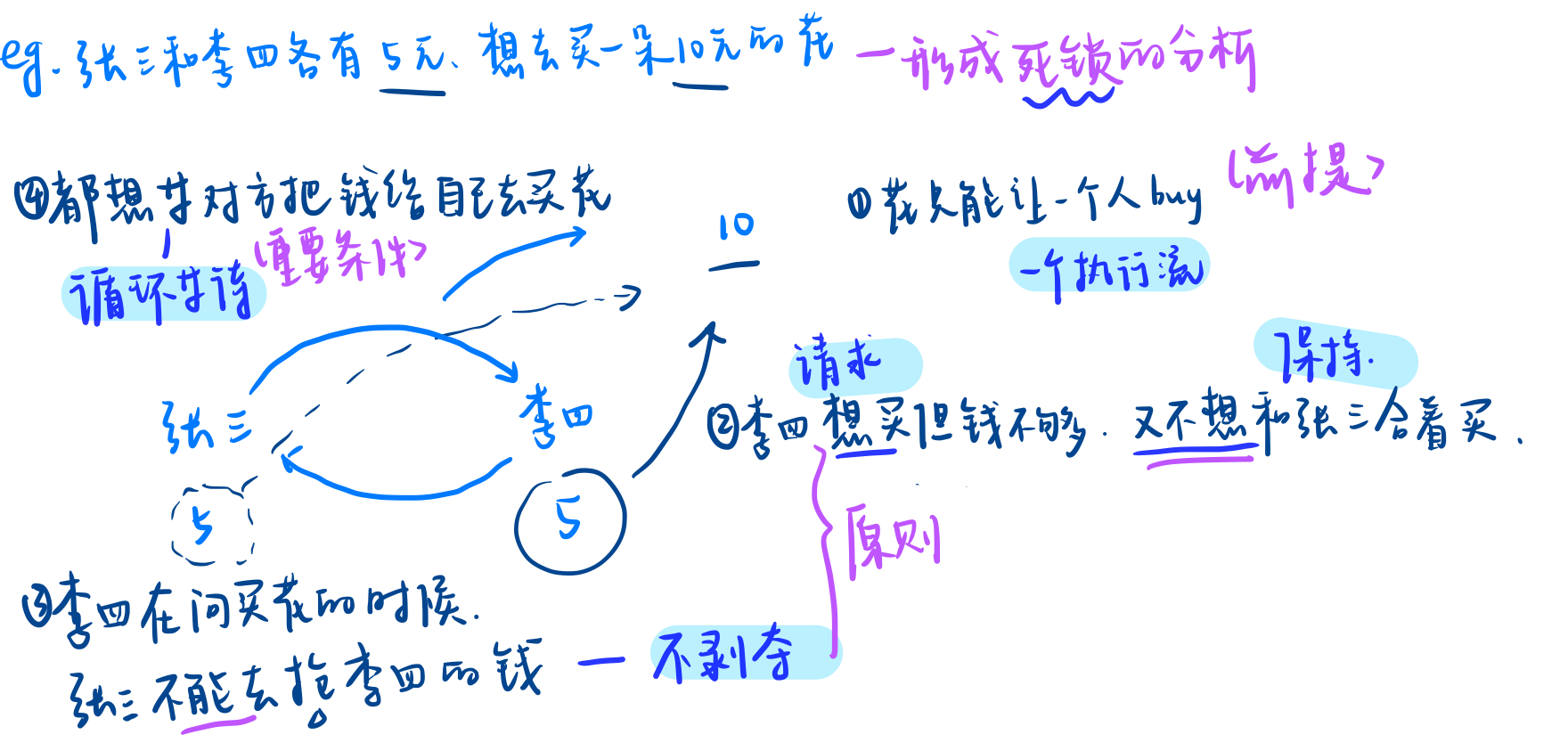
目录 1. 死锁 解决死锁问题 2. 同步 2.1 条件变量函数 cond 2.2 条件变量的使用: 3.CP 问题--理论 4. 基于 BlockingQueue 的生

🌈个人主页:秦jh__https://blog.csdn.net/qinjh_?spm=1010.2135.3001.5343🔥 系列专栏:https://blog.csdn.n
