
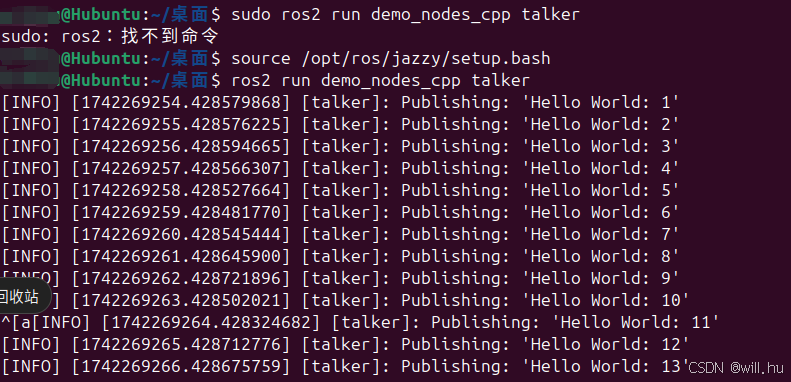
ROS2有多个版本,Jazzy是Ubuntu24.04目前支持的ROS版本,而之前的humble,noetic等版本是不在该版本支持的,所以一定不能安装错版

ROS2有多个版本,Jazzy是Ubuntu24.04目前支持的ROS版本,而之前的humble,noetic等版本是不在该版本支持的,所以一定不能安装错版
ROS2有多个版本,Jazzy是Ubuntu24.04目前支持的ROS版本,而之前的humble,noetic等版本是不在该版本支持的,所以一定不能安装错版
目录 VSCode安装教程 1. 下载VSCode 2. 安装VSCode 3. 初次启动VSCode 4. 基本配置 5. 创建第一个项目 6. 高级配置 7. 扩展推荐
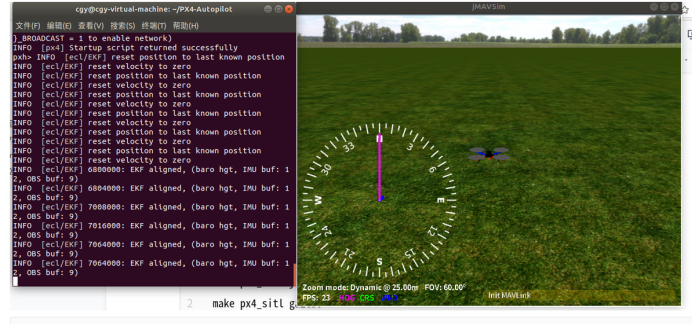
文章目录 系统环境安装依赖PX4 安装老版本安装测试环境变量添加版本查看 安装MAVROS(二进制安装非源码安装)第二种方法测

Windows Server 2016 是微软推出的服务器操作系统,适用于各种规模的企业和组织。这个系统有多个版本,每个版本适用于不同的使用
Ubuntu22.04 安装 ROS1 ROS Noetic Ninjemys 目录 Ubuntu22.04 安装 ROS1 ROS Noetic Ninjemys 简介 安装步骤 步骤 1
项目地址:https://github.com/tadata-org/fastapi_mcp FastAPI-MCP 是一款零配置工具,可让 FastAPI 应用自动暴露所有端点,并
