
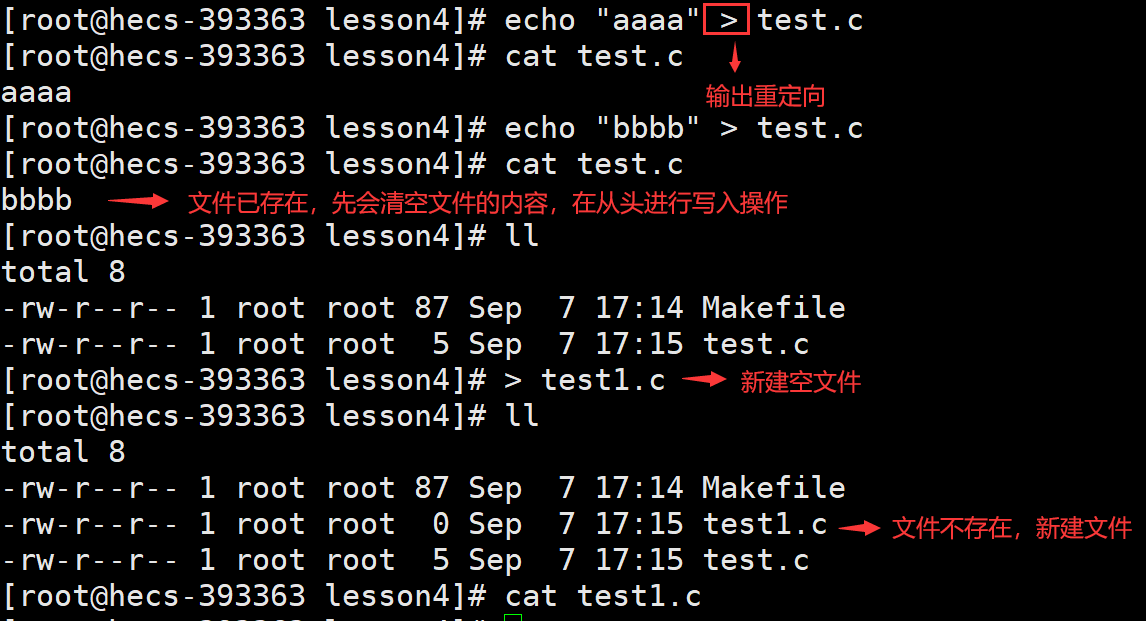
文件 1. 知识铺垫2. C文件I/O2.1. C文件接口2.2 fopen()与重定向2.3. 当前路径2.4. stdin、stdout、stderr 3. 系统文件I/O

文件 1. 知识铺垫2. C文件I/O2.1. C文件接口2.2 fopen()与重定向2.3. 当前路径2.4. stdin、stdout、stderr 3. 系统文件I/O


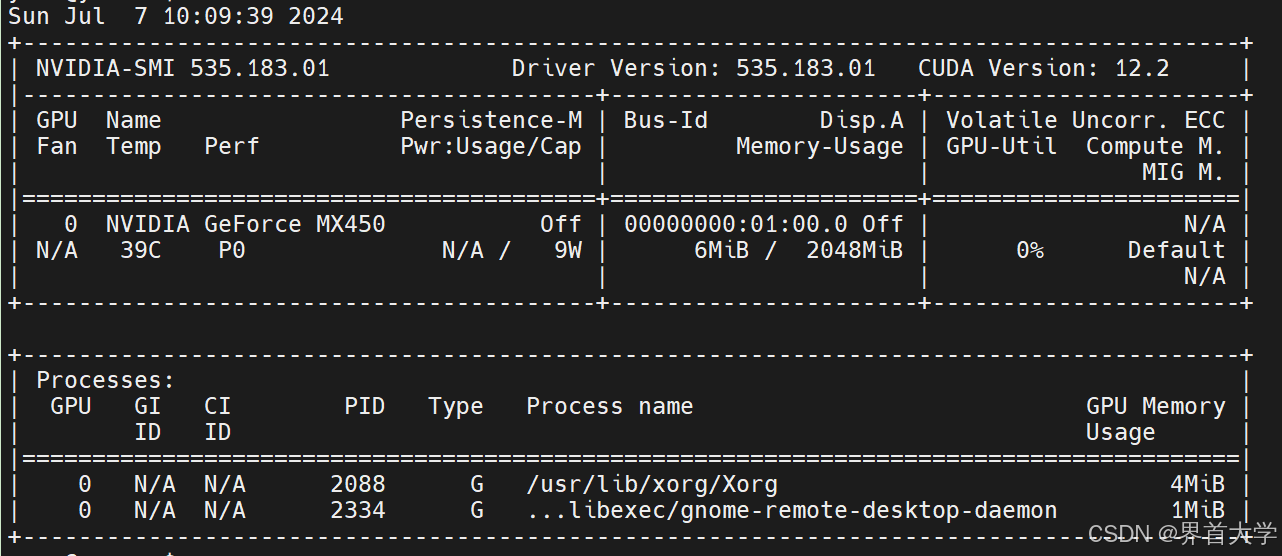
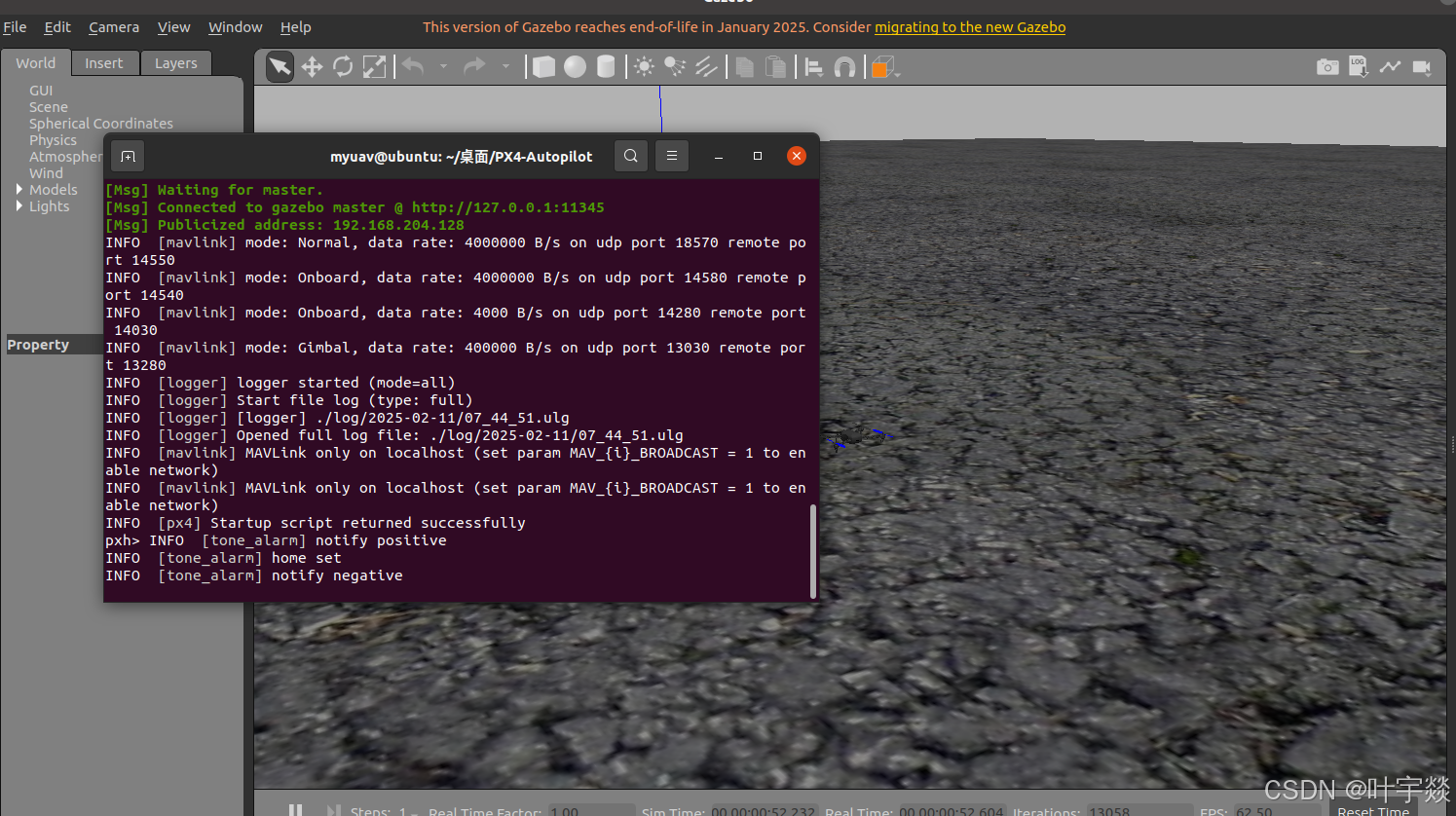
Ubuntu22.04配置ROS2+PX4仿真环境 主要参考源: https://blog.csdn.net/weixin_44174421/article/details/135827130 https
目录 VSCode安装教程 1. 下载VSCode 2. 安装VSCode 3. 初次启动VSCode 4. 基本配置 5. 创建第一个项目 6. 高级配置 7. 扩展推荐
在 ubuntu22.04 + ros2 humble 安装 autoware.universe 1 前言和资料2 正文2.1 基础环境和安装方式选择2.2 autoware 源码安
主要有两个流派 1. 安装Autolabor预编译版 《ros1 ubuntu22.04 安装教程》 报错 下列软件包有未满足的依赖关系: libpango1.
目录 前言 一、安装ROS 二、安装PX4 编译 三、QGC安装 四、安装MAVROS 命令记得加sudo! 前言 在安装ubuntu20.04+ROS+Gazeb
Ubuntu22.04 安装 ROS1 ROS Noetic Ninjemys 目录 Ubuntu22.04 安装 ROS1 ROS Noetic Ninjemys 简介 安装步骤 步骤 1
