
引言 CAN(Controller Area Network)是一种广泛用于嵌入式系统、汽车和工业控制中的通信协议。Linux 支持 CAN 协议栈,并通过


引言 CAN(Controller Area Network)是一种广泛用于嵌入式系统、汽车和工业控制中的通信协议。Linux 支持 CAN 协议栈,并通过

引言 CAN(Controller Area Network)是一种广泛用于嵌入式系统、汽车和工业控制中的通信协议。Linux 支持 CAN 协议栈,并通过

目录 1 -> Linux线程同步 1.1 -> 条件变量 1.2 -> 同步概念与竞态条件 1.3 -> 条件变量函数 1.4 -> 为什么pthread_cond_wait需要
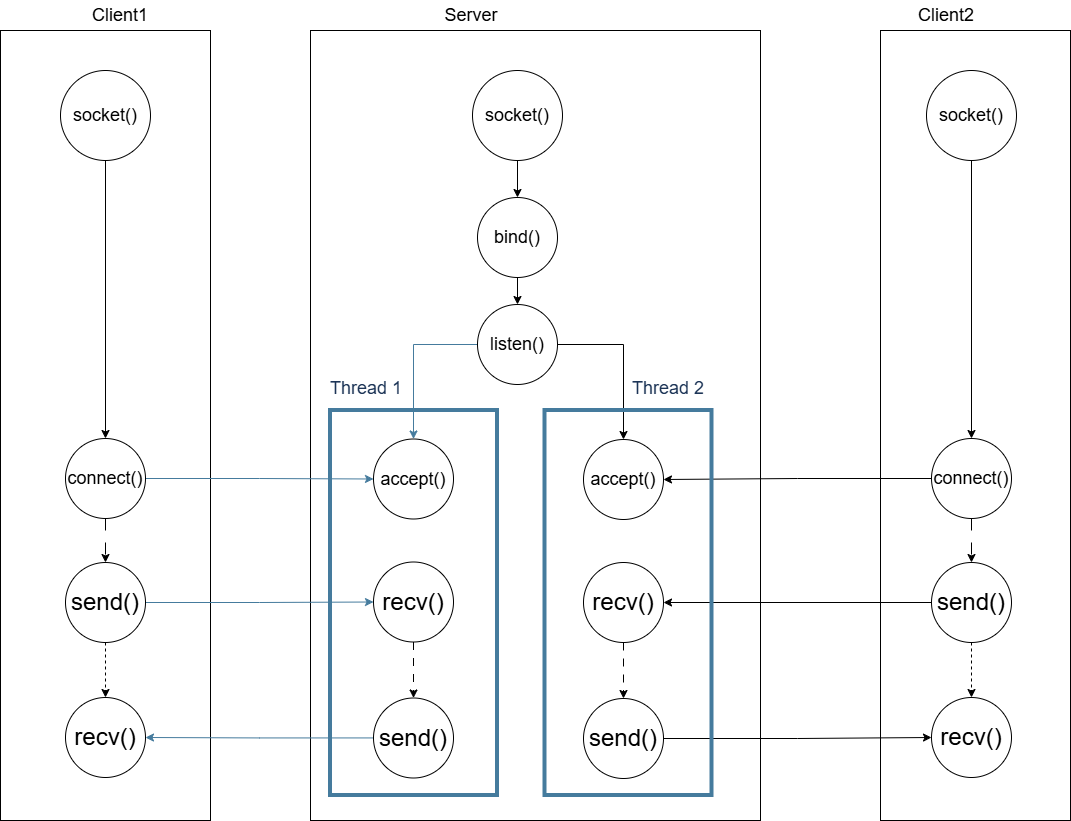
C++ 网络编程:打造多线程 TCP 服务器,同时服务多个客户机! 一、阻塞与并发二、std::thread 简介三、实现过程四、客户端
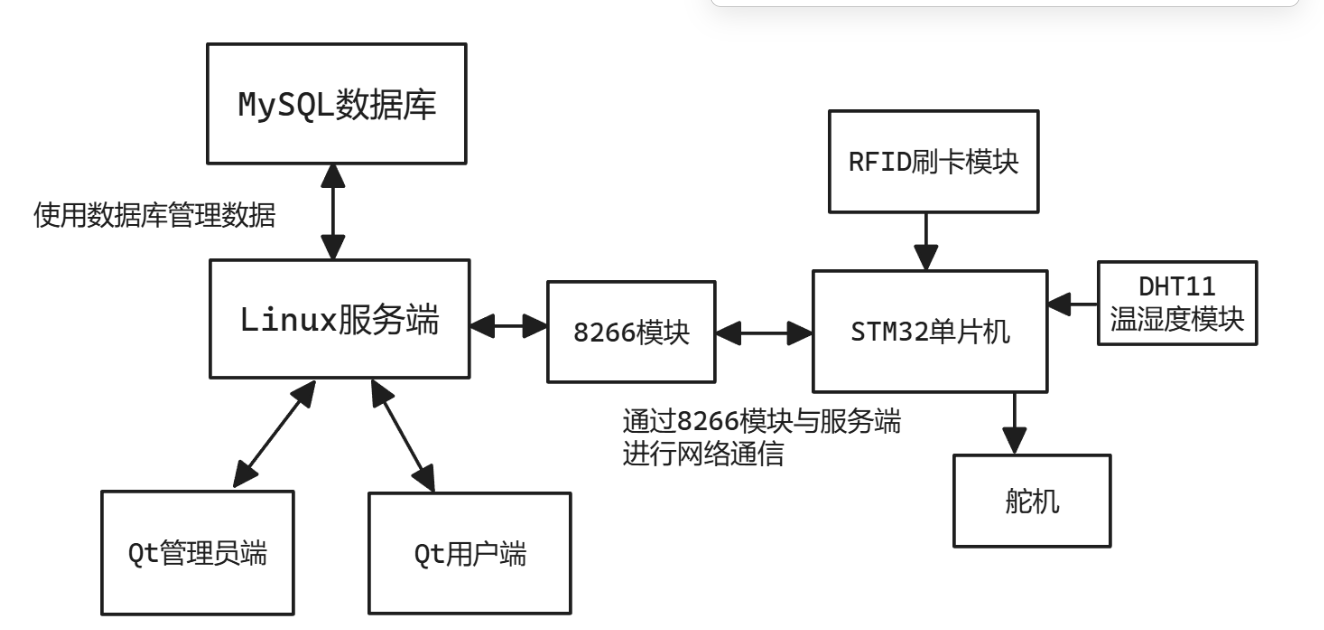
目录 前言 一、使用的技术栈 二、设计流程 2.1、Linux服务器 2.2、QT客管理员端 2.3、QT客户端 2.4、MCU 三、总结 前言

本文目录 一、多线程服务器开发二、TCP状态转换三、端口复用 一、多线程服务器开发 服务端代码如下。 #include #includ
